

Section on how to create Basic volmdlr objects#
Basic Objects#
How to create a Vector#
To instantiate the Vector, you need to provide the required arguments. In this case, the constructor expects two mandatory arguments x and y for the 2-dimensional vector, and an additional argument z for the 3-dimensional vector, which are floats representing the vector’s coordinates. Additionally, there is an optional argument name, which is a string representing the vector’s name.
import volmdlr
vector = volmdlr.Vector2D(1.0, 1.0)
vector.plot(color='orange')
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
import volmdlr
vector = volmdlr.Vector3D(1.0, 1.0, 1.0)
vector.plot(color='orange')
How to create a Point#
Point 2D#
To instantiate the Point2D class, you need to provide the two mandatory arguments required x and y, which are both floats representing the vector’s coordinates. Additionally, there is an optional argument name, which is a string representing the vector’s name.
import volmdlr
point2d = volmdlr.Point2D(x=1.0, y=2.0, name='vector name')
print('point2d:', point2d)
>>> point2d: Point2D: [1.0, 2.0]
Point 3D#
To instantiate the Point3D class, you need to provide three mandatory arguments required x, y, z which are floats representing the vector’s coordinates. Additionally, there is an optional argument name, which is a string representing the vector’s name.
import volmdlr
point3d = volmdlr.Point3D(x=1.0, y=2.0, z=3.0, name='vector name')
print('point3d:', point3d)
>>> point2d: Point3D: [1.0, 2.0, 3.0]
How to create a Frame3D#
The given class Frame3D represents a 3D frame. It defines a frame by specifying its origin point and three basis vectors (u, v, and w) that determine the orientation of the frame.
Example:
import volmdlr
origin = volmdlr.Point3D(0, 0, 0)
u = volmdlr.Vector3D(1, 0, 0)
v = volmdlr.Vector3D(0, 1, 0)
w = volmdlr.Vector3D(0, 0, 1)
frame = volmdlr.Frame3D(origin, u, v, w)
frame.plot()
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Curves#
How to create Line in 2D and 3D#
Line2D and Line3D represents an infinite lines in both 2 and 3D that passes through two points. They are a subclass of Line, which handles line-related operations. The class takes two Point objects as inputs to define the line and an optional name for identification.
To instantiate then, you need to create an object of of the corresponding class by calling its constructor (__init__) and providing the required arguments. Here’s how you can do it:
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
point1 = volmdlr.Point2D(1.0, 1.0)
point2 = volmdlr.Point2D(-2.0, -3.0)
line2d = curves.Line2D(point1, point2, name='line2d_name_is_optional')
line2d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
point1 = volmdlr.Point3D(1.0, 1.0, 1.0)
point2 = volmdlr.Point3D(-2.0, -3.0, -1.0)
line3d = curves.Line3D(point1, point2, name='line3d_name_is_optional')
line3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
How to create a Circle#
Circle2D#
The circle2d is defined by its center point (Point2D) and a radius (float), and it also accepts an optional name for identification.
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
center2d = volmdlr.Point2D(0.0, 0.0)
circle2d = curves.Circle2D(frame=volmdlr.OXY, radius=1, name='optional_circle_name')
circle2d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Circle3D#
The circle is defined by a Frame3D object that includes information about the center and orientation of the circle in 3D space, along with a radius (float). The frame’s u and v vectors define the plane in which the circle lies, and w represents the normal vector to the plane.
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
center3D = volmdlr.Point3D(0.0, 0.0, 0.0)
u_vector = volmdlr.Vector3D(1.0, 0.0, 0.0)
v_vector = volmdlr.Vector3D(0.0, 1.0, 0.0)
w_vector = volmdlr.Vector3D(0.0, 0.0, 1.0)
frame3d = volmdlr.Frame3D(center3D, u_vector, v_vector, w_vector)
circle3d = curves.Circle3D(frame=frame3d, radius=1, name='optional_circle_name')
circle3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
How to create an Ellipse#
An ellipse in defined by three arguments: a major axis (A), e minor axis (B) and a Frame (2D or 3D).
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
u_vector = volmdlr.Vector2D(0.7071067811865475, 0.7071067811865475)
v_vector = volmdlr.Vector2D(-0.7071067811865475, 0.7071067811865475)
frame = volmdlr.Frame2D(volmdlr.O2D, u_vector, v_vector)
ellipse2d = curves.Ellipse2D(major_axis=2, minor_axis=1, frame=frame)
ellipse2d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
vector1 = volmdlr.Vector3D(1, 1, 1)
vector1 = vector1.unit_vector()
vector2 = vector1.deterministic_unit_normal_vector()
vector3 = vector1.cross(vector2)
frame = volmdlr.Frame3D(volmdlr.O3D, vector1, vector2, vector3)
ellipse3d = curves.Ellipse3D(major_axis=2, minor_axis=1, frame=frame)
ellipse3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
How to create an Hyperbola#
A Hyperbola in defined by three arguments: a frame (2D or 3D), a semi major axis and a semi minor axis. For more details on Hyperbolas, you can search for the corresponding class in Curves:.
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
hyperberbola_2d = curves.Hyperbola2D(volmdlr.OXY, 1, 2)
hyperberbola_2d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
hyperberbola_3d = curves.Hyperbola3D(volmdlr.OXYZ, 1, 2)
hyperberbola_3d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
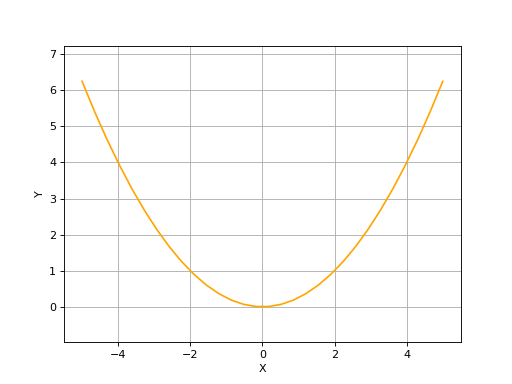
How to create an Parabola#
A Parabola in defined by two arguments: a frame (2D or 3D) and the focal length value. There’s also an optional name parameter. For more details on Parabolas, you can search for the corresponding class in Curves:.
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
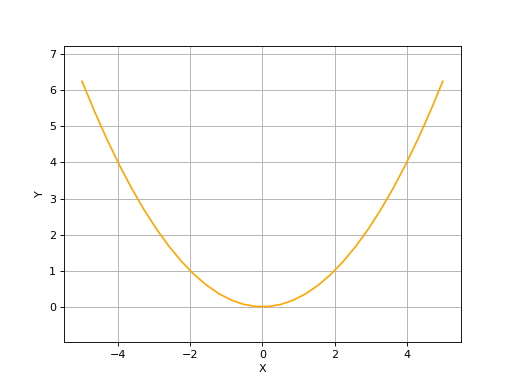
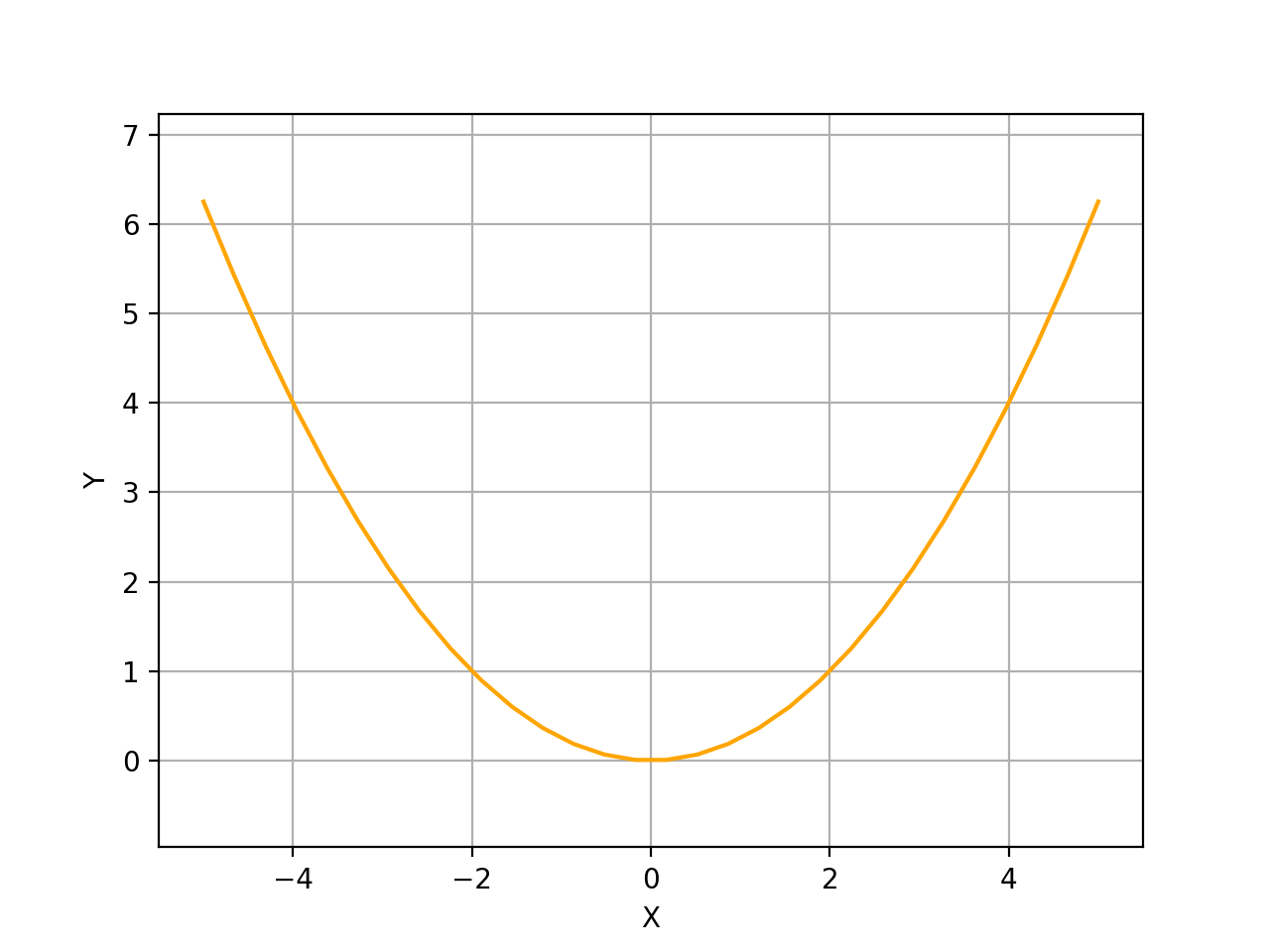
parabola_2d = curves.Parabola2D(volmdlr.OXY, 1)
parabola_2d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
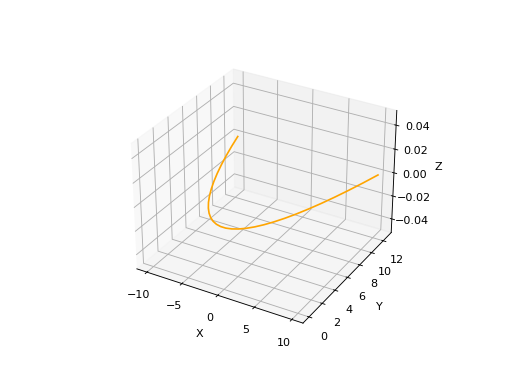
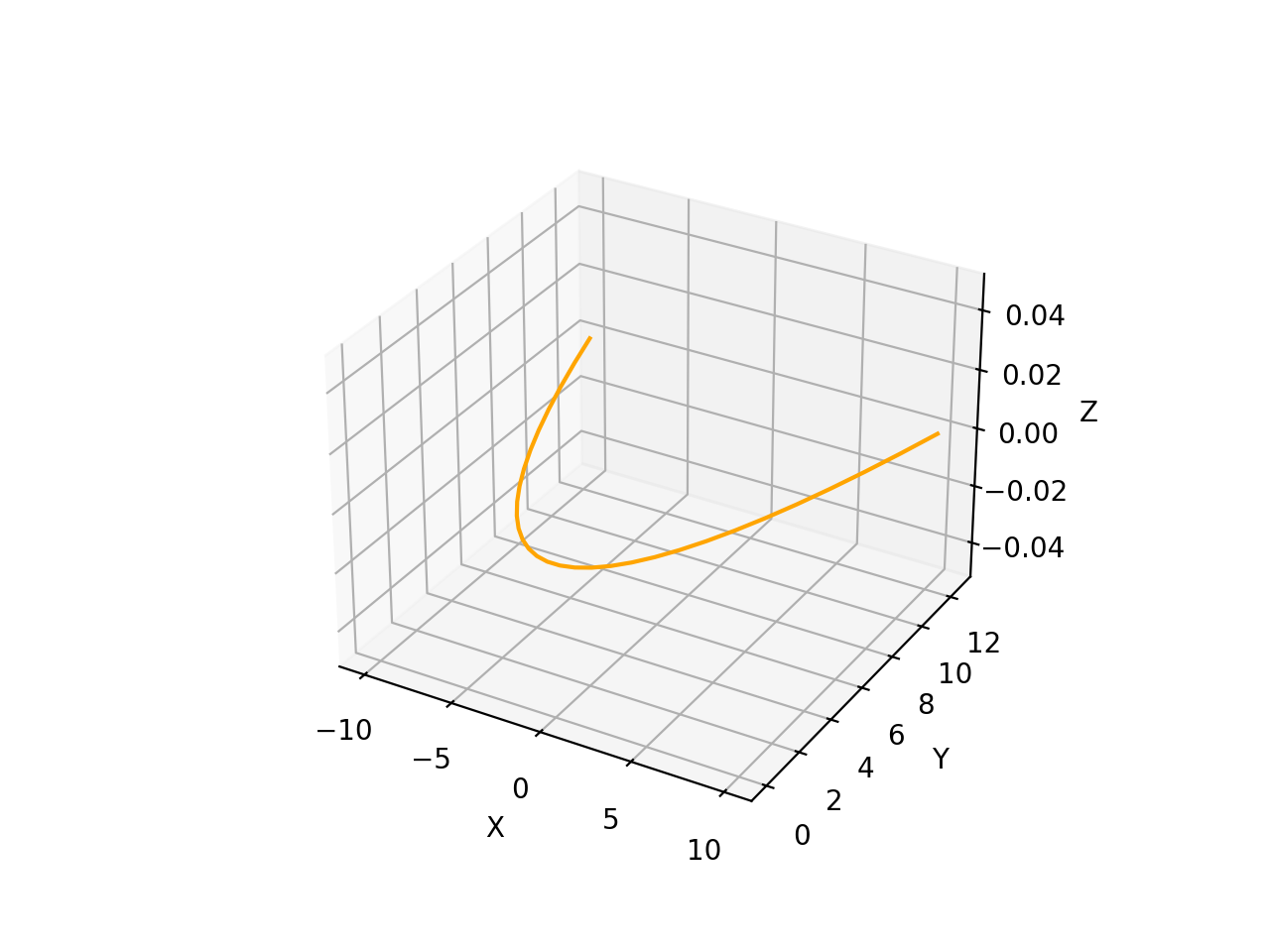
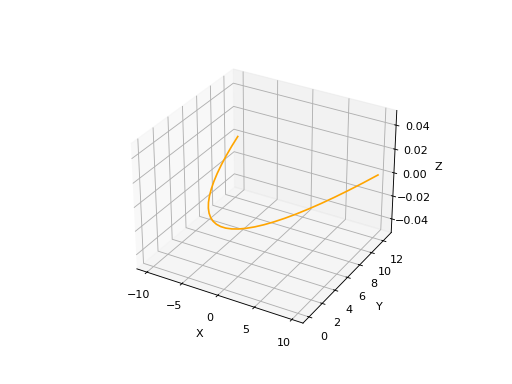
import volmdlr
from volmdlr import curves
from volmdlr.core import EdgeStyle
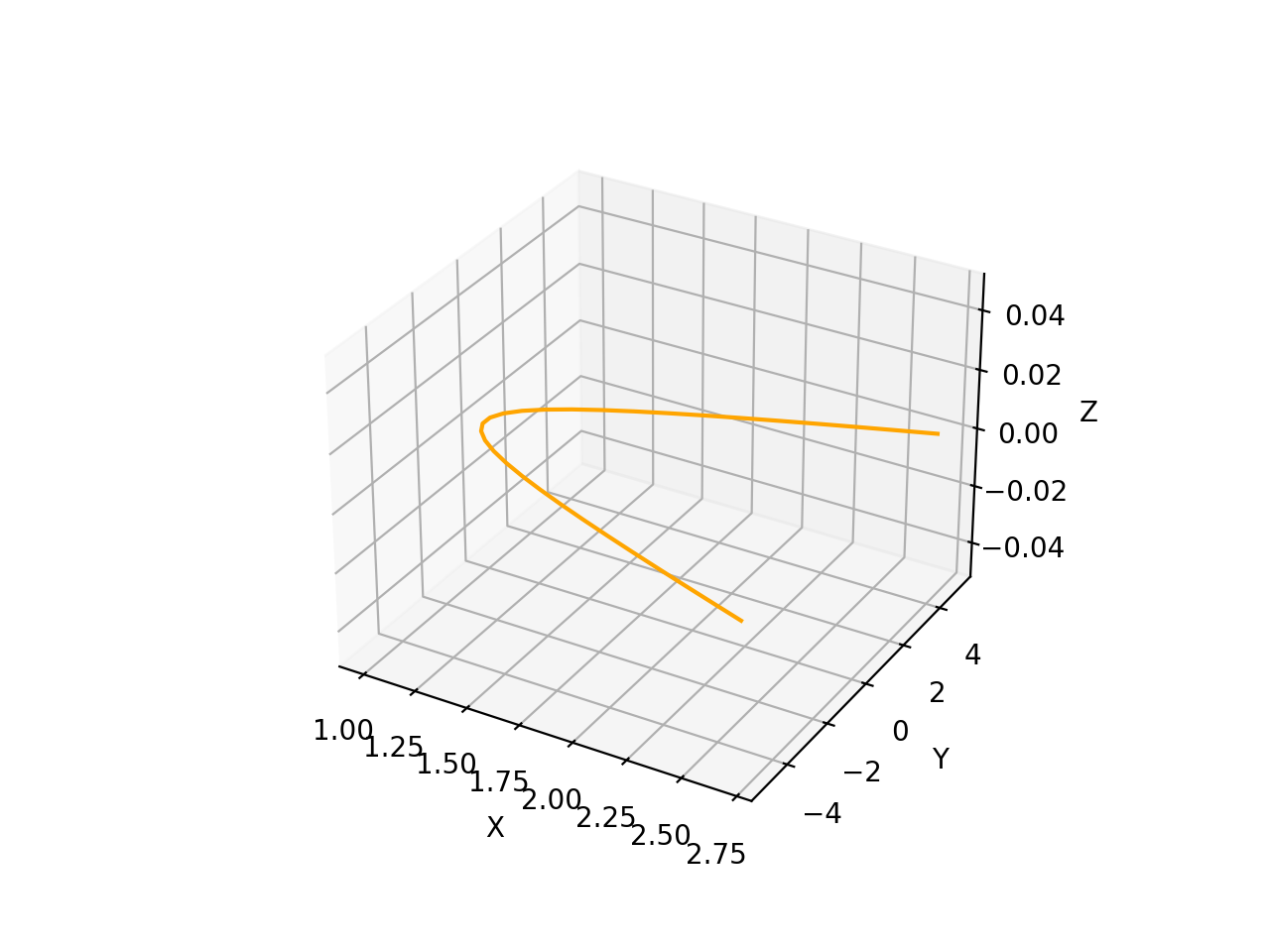
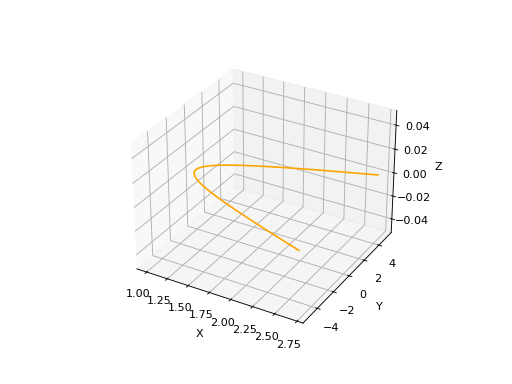
parabola_3d = curves.Parabola3D(volmdlr.OXYZ, 2)
parabola_3d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Edges#
How to create a LineSegment#
To Instantiate a LineSegment in 2D or 3D, you will need to provide two mandatory arguments, the start and end points. Additionally you will have two optional arguments: an infinite line which the line segment lies on and a name argument.
LineSegment2D#
import volmdlr
from volmdlr import edges
from volmdlr.core import EdgeStyle
start_point = volmdlr.Point2D(1.0, 1.0)
end_point = volmdlr.Point2D(3.0, 4.0)
linesegment2d = edges.LineSegment2D(start=start_point, end=end_point, name='linesegment\'s name')
linesegment2d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
LineSegment3D#
import volmdlr
from volmdlr import edges
from volmdlr.core import EdgeStyle
start_point = volmdlr.Point3D(1.0, 1.0, 1.0)
end_point = volmdlr.Point3D(3.0, 4.0, 6.0)
linesegment3d = edges.LineSegment3D(start=start_point, end=end_point, name='linesegment\'s name')
linesegment3d.plot(edge_style=EdgeStyle(color='orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
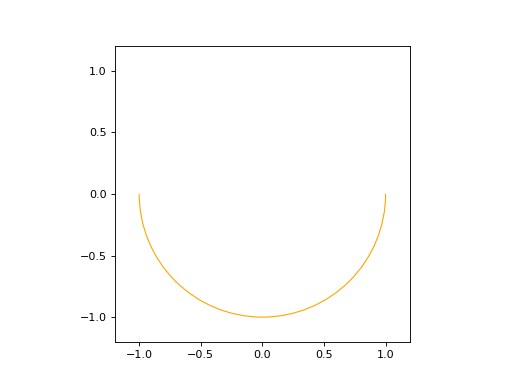
How to create an Arc#
Arc2D#
An Arc2D is defined by the base circle curve along with a start and end points. There is also a boolean is_trigo argument that defines if the arc is in the trigo-wise direction or not and a last and optional name argument.
import volmdlr
from volmdlr import edges, curves
from volmdlr.core import EdgeStyle
circle2d = curves.Circle2D(volmdlr.OXY, 1)
arc2d = edges.Arc2D(circle2d, volmdlr.Point2D(-1, 0), volmdlr.Point2D(1, 0), True)
ax = arc2d.plot(edge_style=EdgeStyle('orange'))
ax.set_aspect('equal')
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
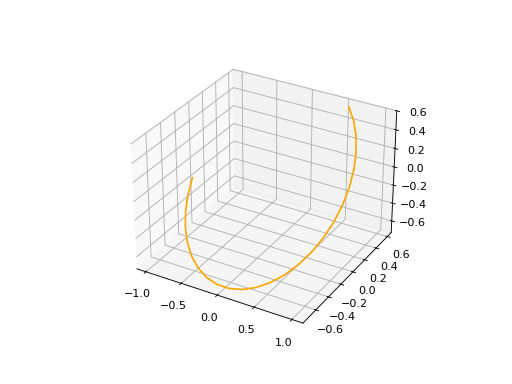
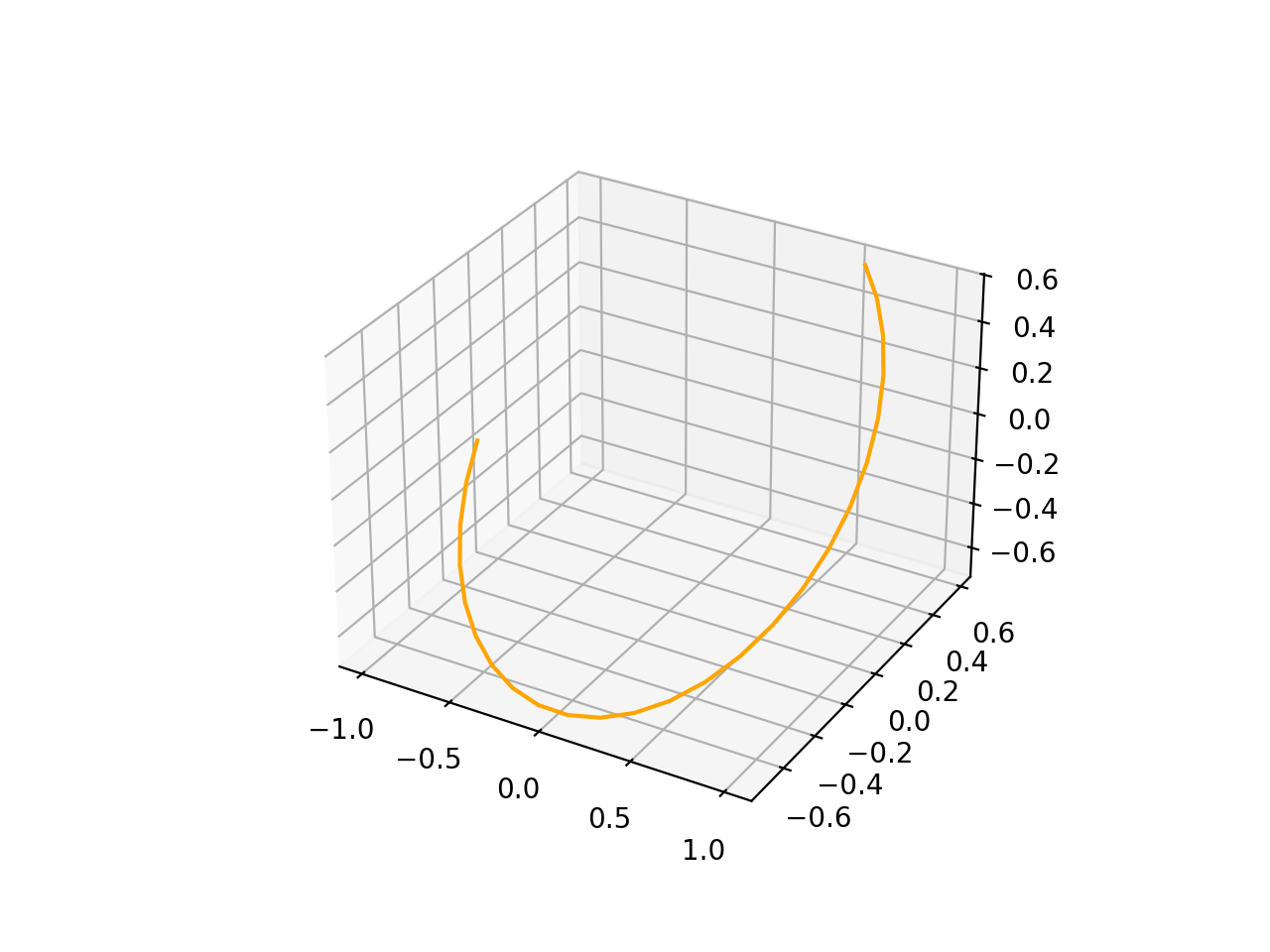
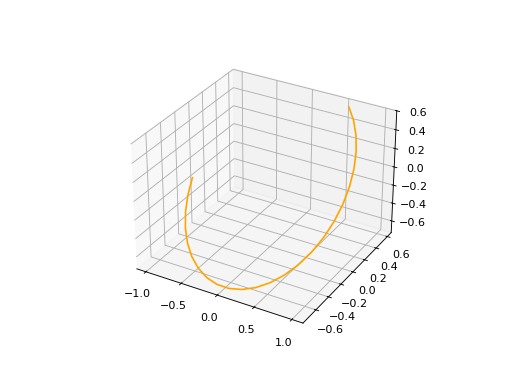
Arc3D#
Just as the Arc2D, Arc3D is defined by the base circle curve along with a start and end points. There is also an optional name argument.
import volmdlr
from volmdlr import edges, curves
from volmdlr.core import EdgeStyle
vector1 = volmdlr.Vector3D(1, 1, 1)
vector1 = vector1.unit_vector()
vector2 = vector1.deterministic_unit_normal_vector()
vector3 = vector1.cross(vector2)
frame = volmdlr.Frame3D(volmdlr.O3D, vector1, vector2, vector3)
circle3d = curves.Circle3D(frame, 1)
start = volmdlr.Point3D(
0.5773502691896258, 0.5773502691896258, 0.5773502691896258
)
end = volmdlr.Point3D(
-0.9855985596534886, -0.11957315586905026, -0.11957315586905026
)
arc3d = edges.Arc3D(circle3d, start=start, end=end)
ax = arc3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
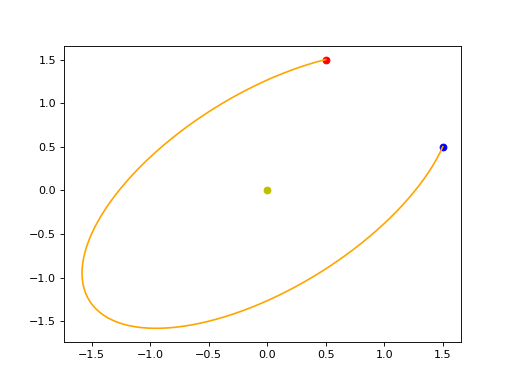
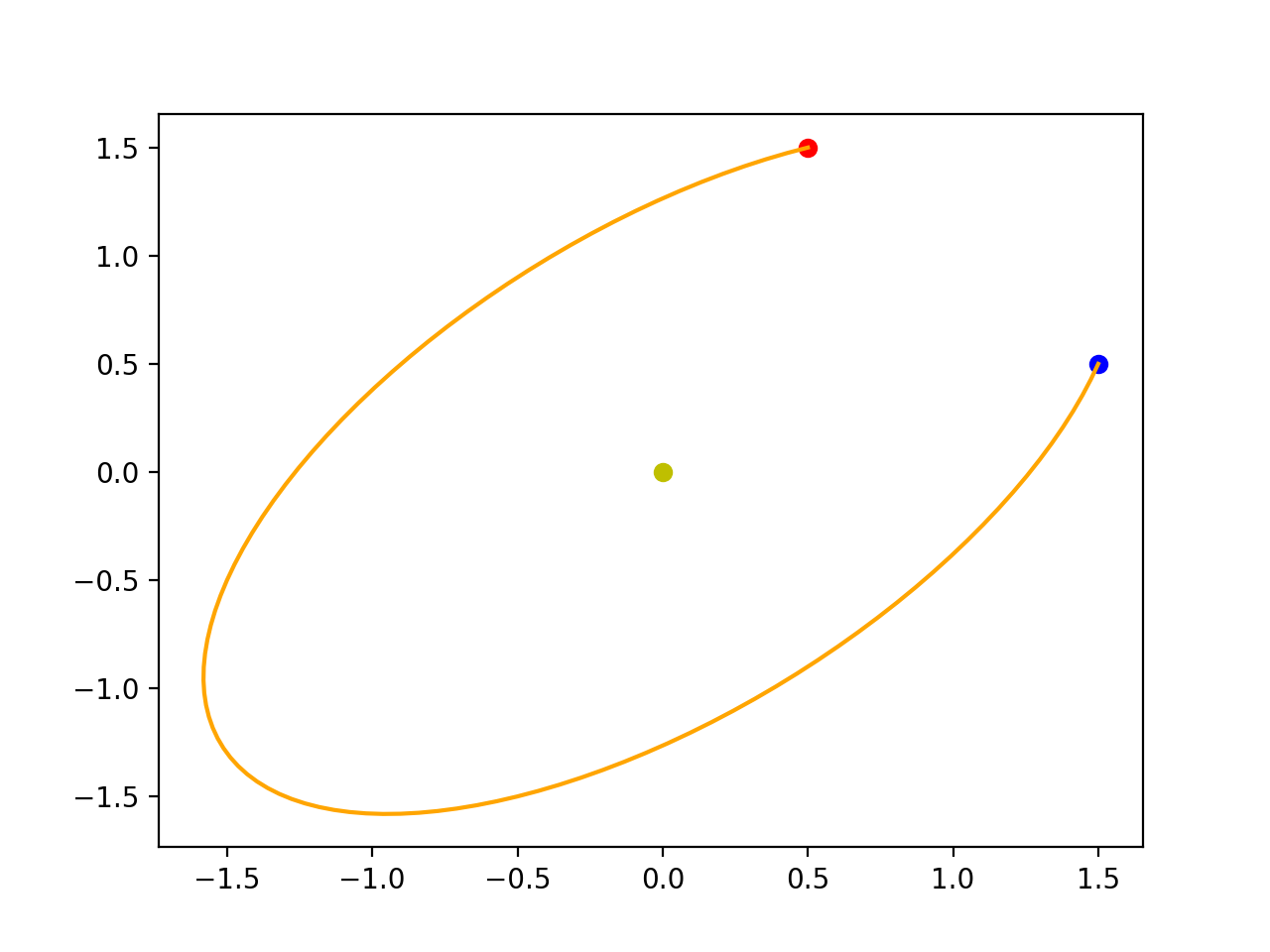
How to create an ArcEllipse#
Both ArcEllipse2D and ArcEllipse3D require a base Ellipse curve along with a start end end points. There also an optional name argument.
ArcEllipse2D#
Object’s description
import volmdlr
from volmdlr import edges, curves
from volmdlr.core import EdgeStyle
u_vector = volmdlr.Vector2D(0.7071067811865475, 0.7071067811865475)
v_vector = volmdlr.Vector2D(-0.7071067811865475, 0.7071067811865475)
frame = volmdlr.Frame2D(volmdlr.O2D, u_vector, v_vector)
ellipse2d = curves.Ellipse2D(2, 1, frame)
arc_ellipse2d = edges.ArcEllipse2D(
ellipse2d,
start=volmdlr.Point2D(0.5, 1.5),
end=volmdlr.Point2D(1.5, 0.5),
)
arc_ellipse2d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
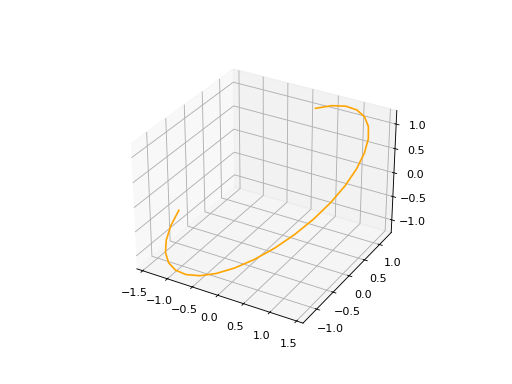
ArcEllipse3D#
Object’s description
import volmdlr
from volmdlr import edges, curves
from volmdlr.core import EdgeStyle
vector1 = volmdlr.Vector3D(1, 1, 1)
vector1 = vector1.unit_vector()
vector2 = vector1.deterministic_unit_normal_vector()
vector3 = vector1.cross(vector2)
frame = volmdlr.Frame3D(volmdlr.O3D, vector1, vector2, vector3)
start_point = volmdlr.Point3D(
0.2391463117381003, 1.1051717155225391, 1.1051717155225391
)
end_point = volmdlr.Point3D(
-1.393846850117352, -0.5278214463329132, -0.5278214463329132
)
ellipse3d = curves.Ellipse3D(2, 1, frame)
arc_ellipse3d = edges.ArcEllipse3D(ellipse3d, start=start_point, end=end_point)
arc_ellipse3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
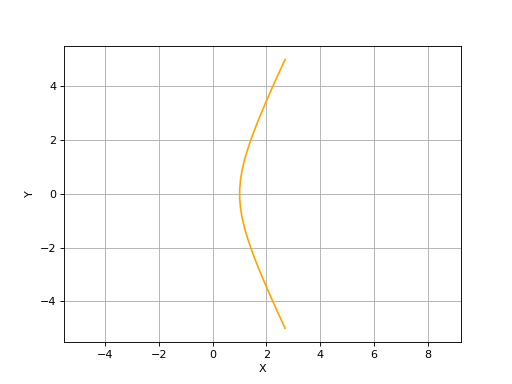
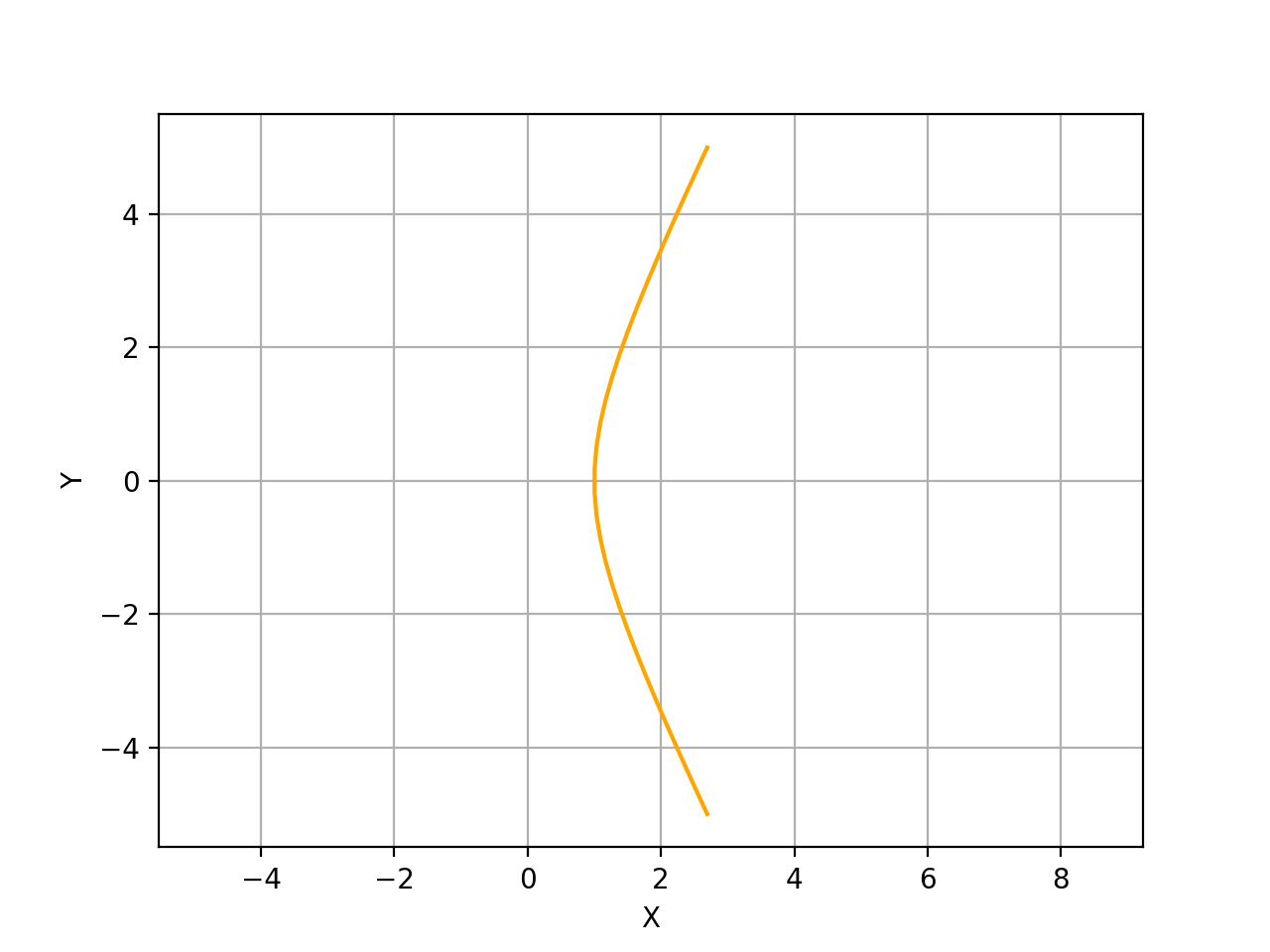
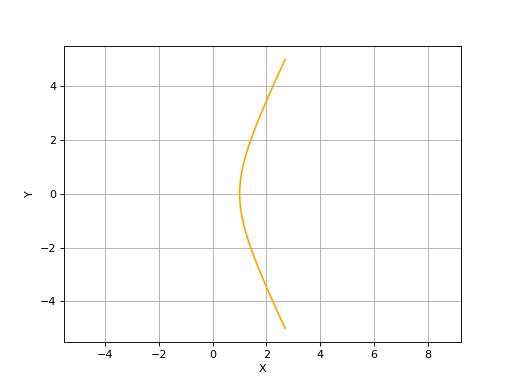
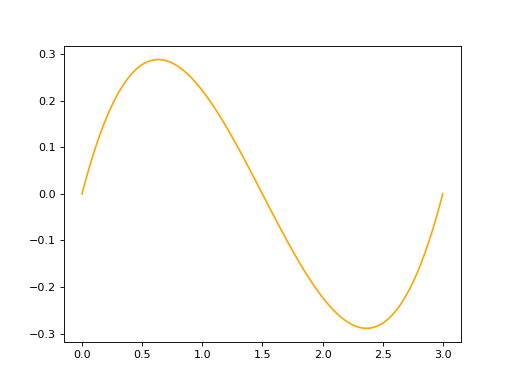
How to create a BSplineCurve#
To instantiate a BsplineCurve 2D or 3D, we must provide the necessary parameters, such as the degree, control points, knot multiplicities, knot vector, and optional weights and name.
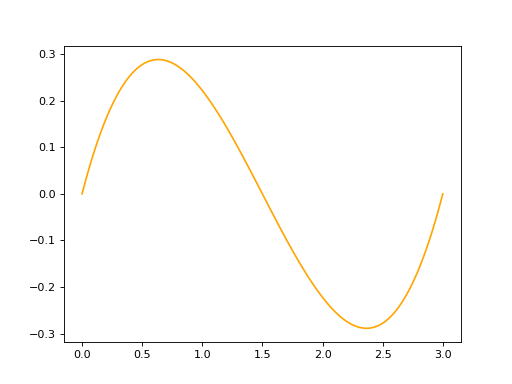
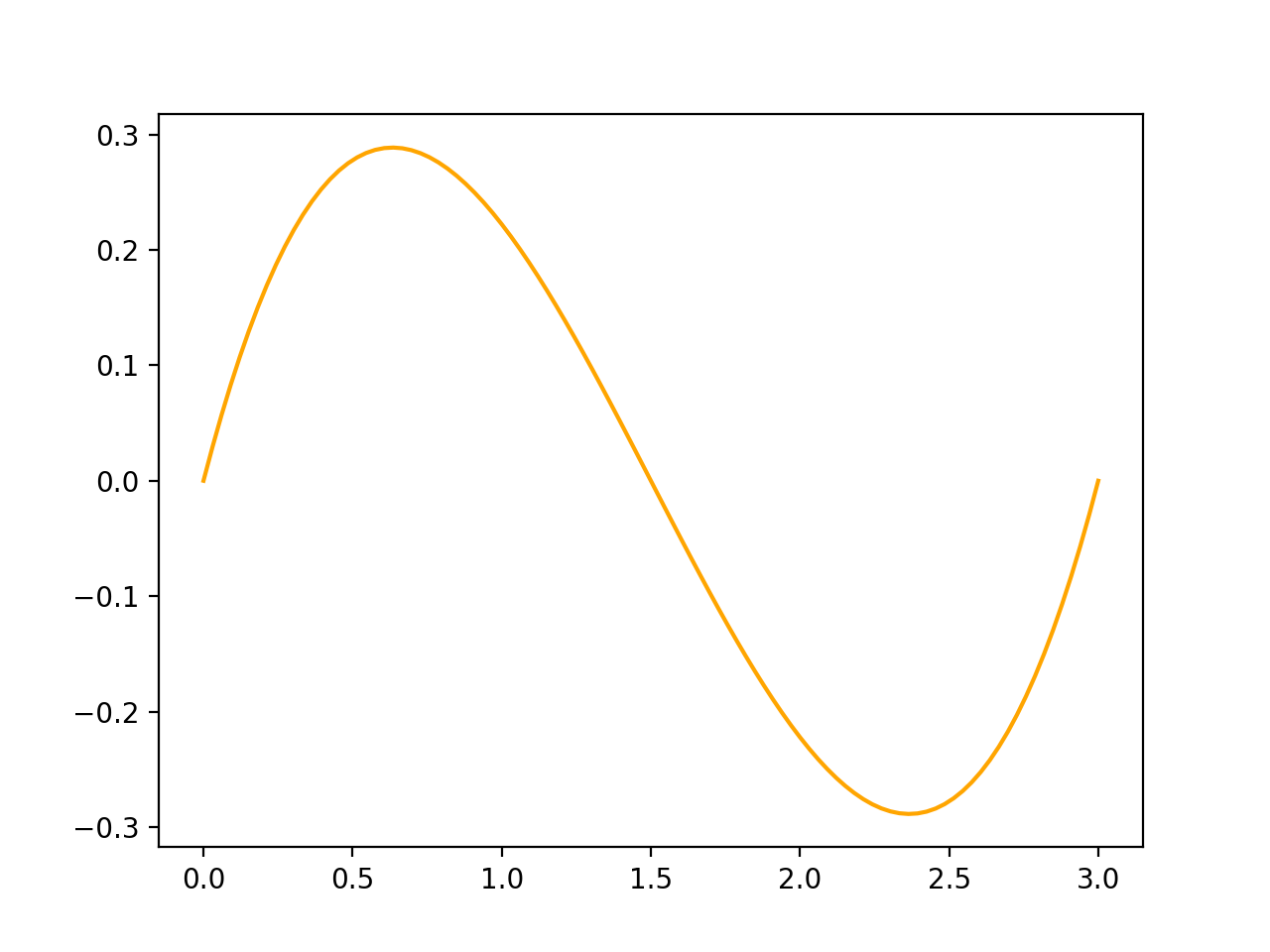
BSplineCurve2D#
import volmdlr
from volmdlr import edges
from volmdlr.core import EdgeStyle
from geomdl import utilities
DEGREE = 3
points = [volmdlr.Point2D(0, 0), volmdlr.Point2D(1, 1), volmdlr.Point2D(2, -1), volmdlr.Point2D(3, 0)]
knotvector = utilities.generate_knot_vector(DEGREE, len(points))
knot_multiplicity = [1] * len(knotvector)
bspline1 = edges.BSplineCurve2D(DEGREE, points, knot_multiplicity, knotvector, None, False)
bspline1.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
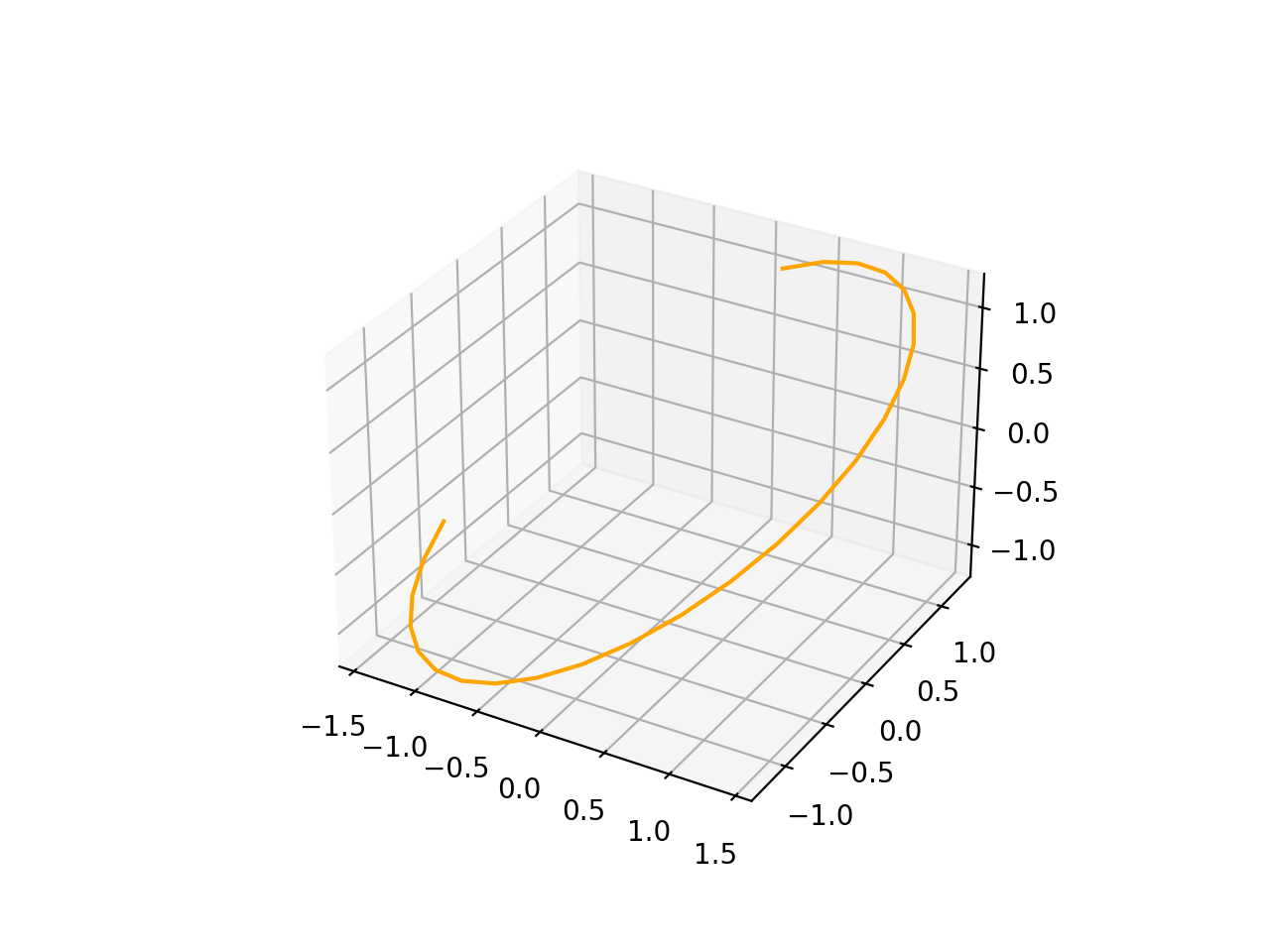
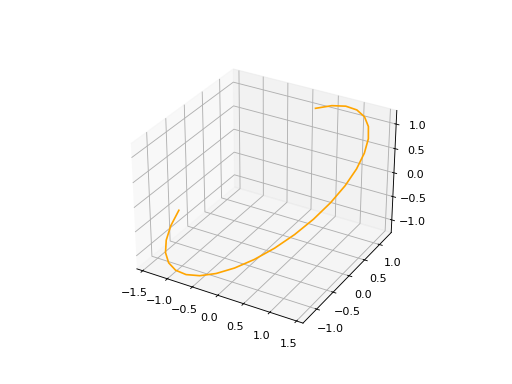
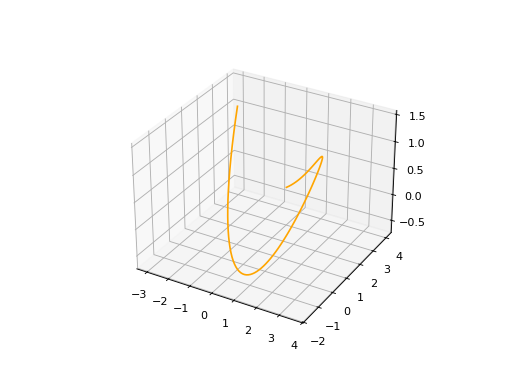
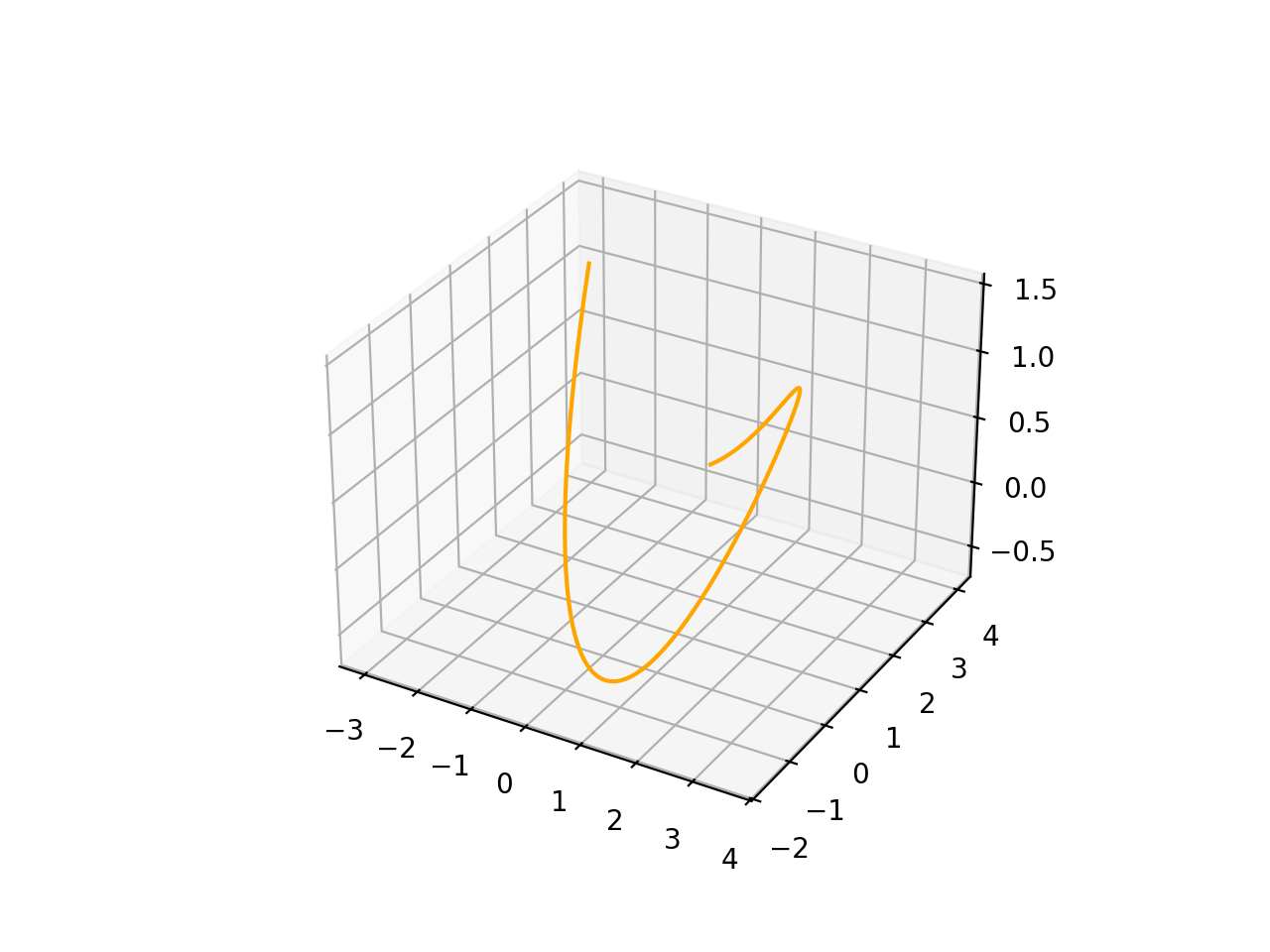
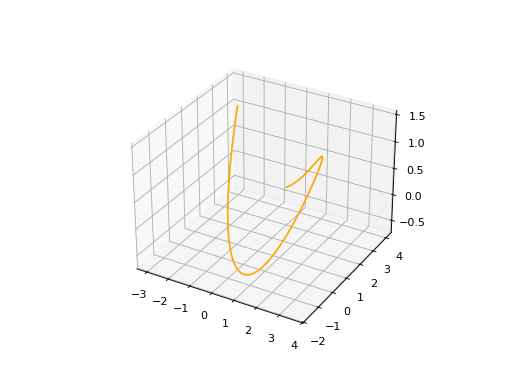
BSplineCurve3D#
import volmdlr
from volmdlr import edges
from volmdlr.core import EdgeStyle
degree = 5
control_points = [volmdlr.Point3D(0, 3, 0),
volmdlr.Point3D(3, 2, 1),
volmdlr.Point3D(5, -1, 4),
volmdlr.Point3D(5, -4, 0),
volmdlr.Point3D(-1, -2, -3),
volmdlr.Point3D(-3, 4, 1)]
knots = [0.0, 1.0]
knot_multiplicities = [6, 6]
weights = None # [1, 2, 1, 2, 1, 2]
bspline_curve3d = edges.BSplineCurve3D(
degree=degree,
control_points=control_points,
knot_multiplicities=knot_multiplicities,
knots=knots,
weights=weights,
name='B Spline Curve 3D 1',
)
bspline_curve3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Wires#
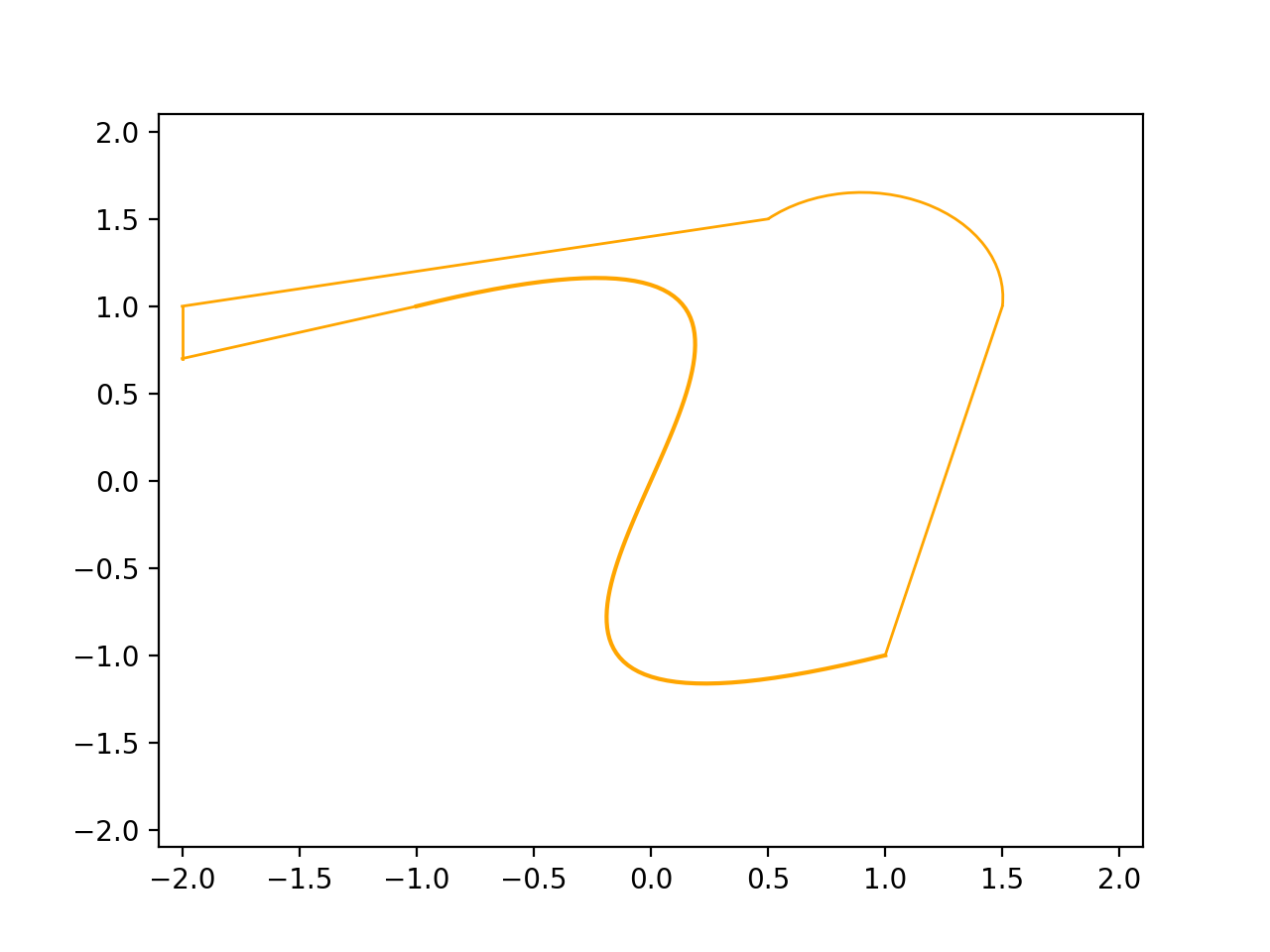
Let’s suppose we want to instantiate the contour of the image below:
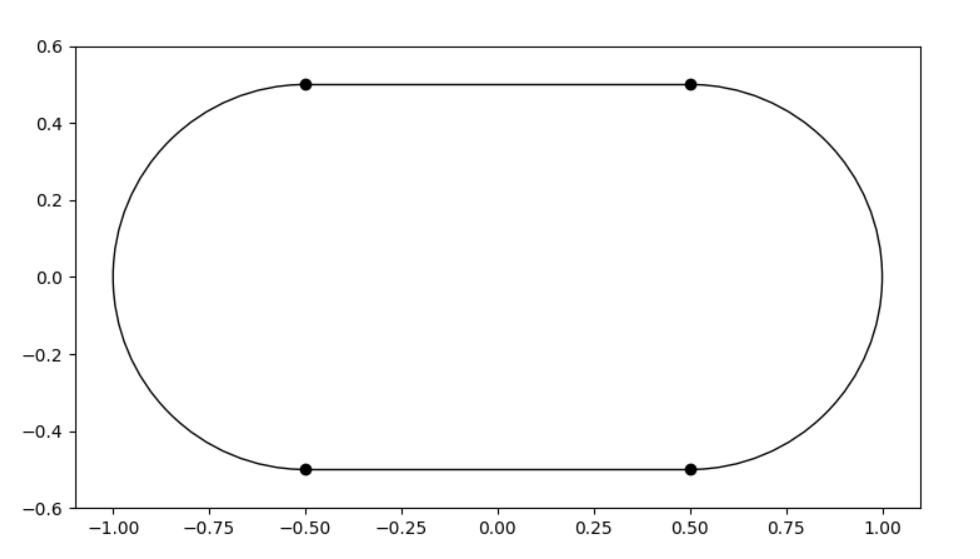
The right code to have a valid contour should be something like this:
import volmdlr
from volmdlr import curves, edges, wires
from volmdlr.core import EdgeStyle
point1 = volmdlr.Point2D(-0.5, -0.5)
point2 = volmdlr.Point2D(0.5, -0.5)
point3 = volmdlr.Point2D(0.5, 0.5)
point4 = volmdlr.Point2D(-0.5, 0.5)
circle1 = curves.Circle2D.from_center_and_radius(volmdlr.Point2D(0.5, 0.0), 0.5)
circle2 = curves.Circle2D.from_center_and_radius(volmdlr.Point2D(-0.5, 0.0), 0.5)
edge1 = edges.LineSegment2D(start=point1, end=point2)
edge2 = edges.Arc2D(circle=circle1, start=point2, end=point3)
edge3 = edges.LineSegment2D(start=point3, end=point4)
edge4 = edges.Arc2D(circle=circle2, start=point4, end=point1)
contour = wires.Contour2D([edge1, edge2, edge3, edge4])
contour.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
The rule to instantiate a wire is:
Connected edges should share the same vertice.
Note that when defining edge1, edge2, edge3 and edge4, the start of an edge is always the same point of the end of the previous edge. It is important to emphasise that it must be the exact same instance, not only coincident points.
In practice, this rule ensures a topologically connected contour. Although no verification is performed during the initialization of these objects regarding this rule, there exists a method named `is_connected that you can use to verify if your current contour was constructed correctly.
Now, let’s consider a scenario where you receive a list of edges as input, and you’re uncertain if it was constructed properly. Take the following example, incorrectly done on purpose, where although coincident the points used to define the edges, they are not the same instance and also the edges are not in the correct order:
import volmdlr
from volmdlr import curves, edges, wires
circle1 = curves.Circle2D.from_center_and_radius(volmdlr.Point2D(0.5, 0.0), 0.5)
circle2 = curves.Circle2D.from_center_and_radius(volmdlr.Point2D(-0.5, 0.0), 0.5)
edge1 = edges.LineSegment2D(start=volmdlr.Point2D(-0.5, -0.5), end=volmdlr.Point2D(0.5, -0.5))
edge2 = edges.Arc2D(circle=circle1, start=volmdlr.Point2D(0.5, -0.5), end=volmdlr.Point2D(0.5, 0.5))
edge3 = edges.LineSegment2D(start=volmdlr.Point2D(0.5, 0.5), end=volmdlr.Point2D(-0.5, 0.5))
edge4 = edges.Arc2D(circle=circle2, start=volmdlr.Point2D(-0.5, 0.5), end=volmdlr.Point2D(-0.5, -0.5))
contour = wires.Contour2D([edge1, edge3, edge2, edge4])
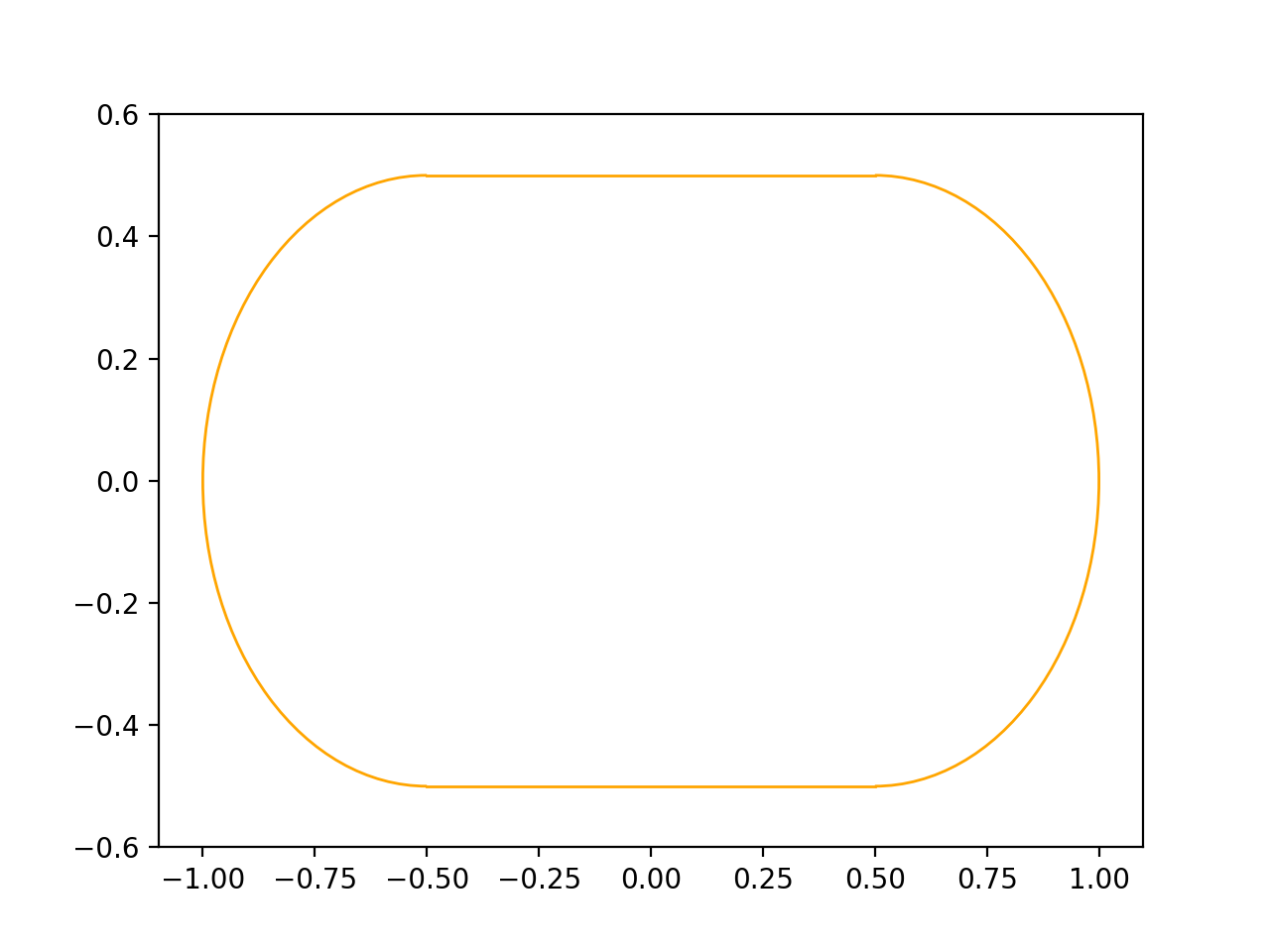
To make sure that you will have a coherent wire at the end, we provide the following static methods to help before instantiating the contour:
...
ordered_primitives = wires.WireMixin.order_primitives(primitives=[edge1, edge3, edge2, edge4])
merged_primitives = wires.merge_primitives_points(primitives=ordered_primitives)
contour = wires.Contour2D(merged_primitives)
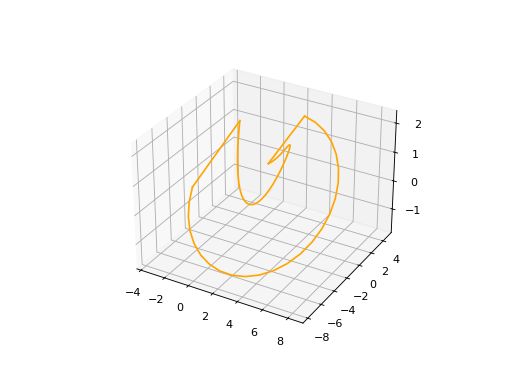
The same rule applies for a Wire in 3D.
import volmdlr
from volmdlr import edges, wires
from volmdlr.core import EdgeStyle
degree = 5
control_points = [volmdlr.Point3D(0, 3, 0),
volmdlr.Point3D(3, 2, 1),
volmdlr.Point3D(5, -1, 4),
volmdlr.Point3D(5, -4, 0),
volmdlr.Point3D(-1, -2, -3),
volmdlr.Point3D(-3, 4, 1)]
knots = [0.0, 1.0]
knot_multiplicities = [6, 6]
weights = None # [1, 2, 1, 2, 1, 2]
bspline_curve3d = edges.BSplineCurve3D(
degree=degree,
control_points=control_points,
knot_multiplicities=knot_multiplicities,
knots=knots,
weights=weights,
name='B Spline Curve 3D 1',
)
lineseg1 = edges.LineSegment3D(
volmdlr.Point3D(3, 3, 2), bspline_curve3d.start
)
lineseg2 = edges.LineSegment3D(
bspline_curve3d.end, volmdlr.Point3D(-3, -3, 0)
)
primitives = [lineseg1, bspline_curve3d, lineseg2]
ordered_primitives = wires.WireMixin.order_primitives(
primitives=primitives
)
merged_primitives = wires.merge_primitives_points(
primitives=ordered_primitives
)
wire3d = wires.Wire3D(merged_primitives)
wire3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
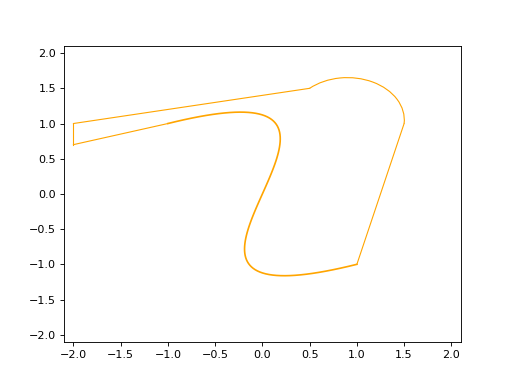
How to create a Contour#
As a wire, A contour is also an object composed of a list of primitives but now it forms a closed loop. The optional name argument is always present. The primitives list can contain any set of edges following each other.
Contour2D#
import volmdlr
from volmdlr import edges, wires
from volmdlr.core import EdgeStyle
line_segment1 = edges.LineSegment2D(volmdlr.Point2D(1, -1), volmdlr.Point2D(1.5, 1))
line_segment2 = edges.LineSegment2D(volmdlr.Point2D(0.5, 1.5), volmdlr.Point2D(-2, 1))
line_segment3 = edges.LineSegment2D(volmdlr.Point2D(-2, 1), volmdlr.Point2D(-2, 0.7))
line_segment4 = edges.LineSegment2D(volmdlr.Point2D(-2, 0.7), volmdlr.Point2D(-1, 1))
arc = edges.Arc2D.from_3_points(
volmdlr.Point2D(1.5, 1),
volmdlr.Point2D(1.3, 1.5),
volmdlr.Point2D(0.5, 1.5),
)
points2d = [
volmdlr.Point2D(-1, 1),
volmdlr.Point2D(2, 2),
volmdlr.Point2D(-2, -2),
volmdlr.Point2D(1, -1),
]
bspline = edges.BSplineCurve2D(
3, points2d, knot_multiplicities=[4, 4], knots=[0.0, 1.0]
)
primitives = [
bspline, line_segment1, arc,
line_segment2, line_segment3, line_segment4,
]
ordered_primitives = wires.WireMixin.order_primitives(
primitives=primitives
)
merged_primitives = wires.merge_primitives_points(
primitives=ordered_primitives
)
wire2d = wires.Wire2D(primitives=merged_primitives)
wire2d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
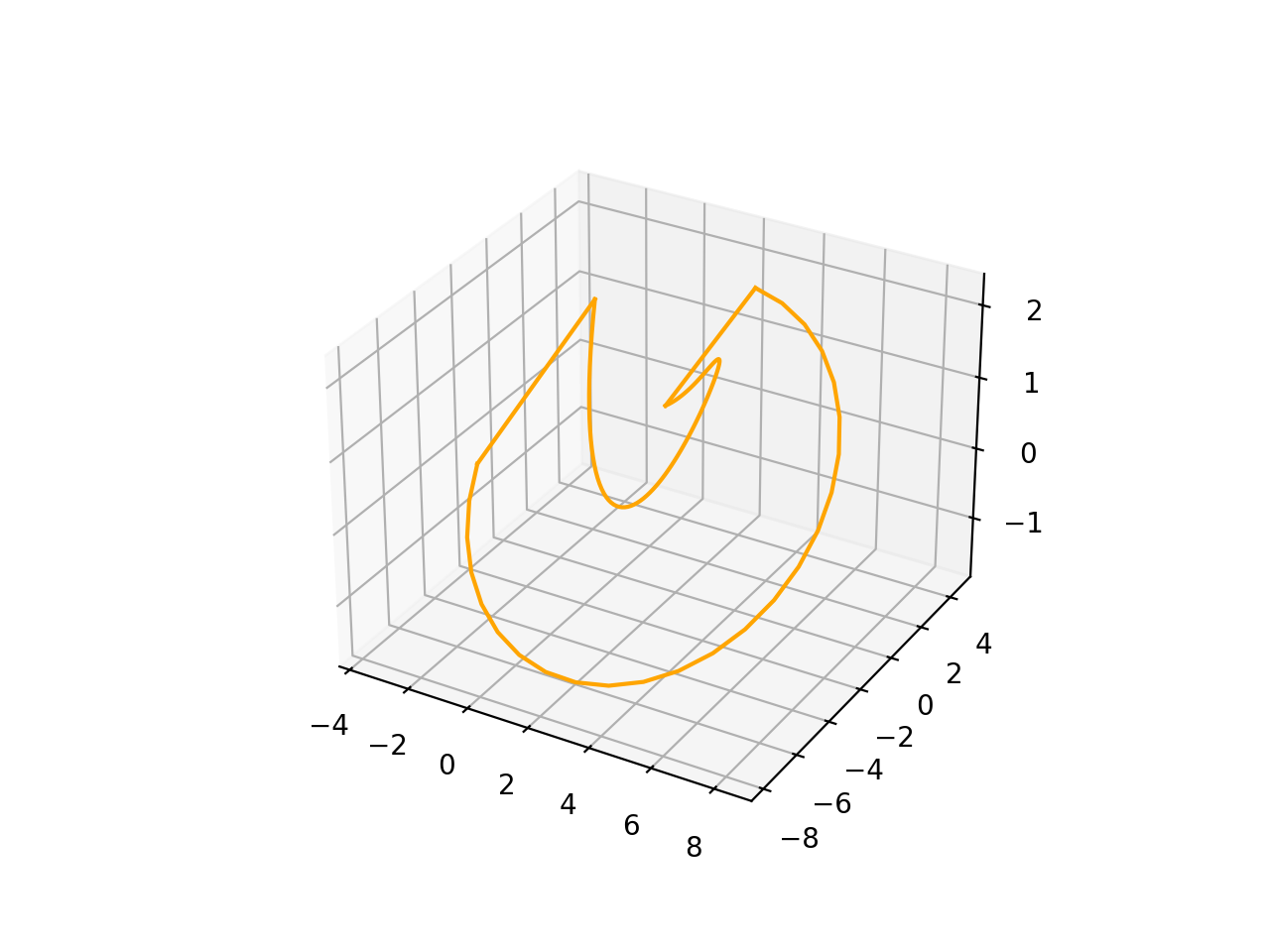
Contour3D#
import volmdlr
from volmdlr import edges, wires
from volmdlr.core import EdgeStyle
degree = 5
control_points = [volmdlr.Point3D(0, 3, 0),
volmdlr.Point3D(3, 2, 1),
volmdlr.Point3D(5, -1, 4),
volmdlr.Point3D(5, -4, 0),
volmdlr.Point3D(-1, -2, -3),
volmdlr.Point3D(-3, 4, 1)]
knots = [0.0, 1.0]
knot_multiplicities = [6, 6]
weights = None # [1, 2, 1, 2, 1, 2]
bspline_curve3d = edges.BSplineCurve3D(
degree=degree,
control_points=control_points,
knot_multiplicities=knot_multiplicities,
knots=knots,
weights=weights,
name='B Spline Curve 3D 1',
)
lineseg1 = edges.LineSegment3D(
volmdlr.Point3D(3, 3, 2), bspline_curve3d.start
)
lineseg2 = edges.LineSegment3D(
bspline_curve3d.end, volmdlr.Point3D(-3, -3, 0)
)
arc = edges.Arc3D.from_3_points(
volmdlr.Point3D(-3, -3, 0),
volmdlr.Point3D(6.324555320336761, -5.692099788303083, -0.897),
volmdlr.Point3D(3, 3, 2),
)
primitives = [lineseg1, bspline_curve3d, lineseg2, arc]
ordered_primitives = wires.WireMixin.order_primitives(
primitives=primitives
)
merged_primitives = wires.merge_primitives_points(
primitives=ordered_primitives
)
wire3d = wires.Wire3D(primitives=merged_primitives)
wire3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Surfaces#
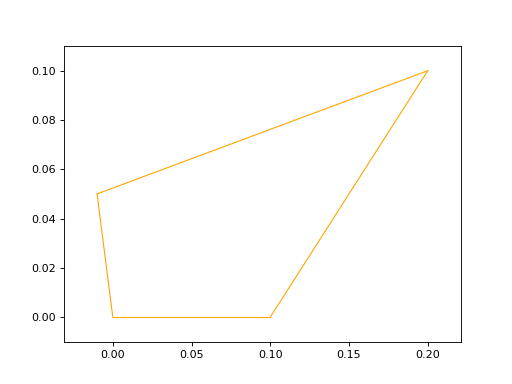
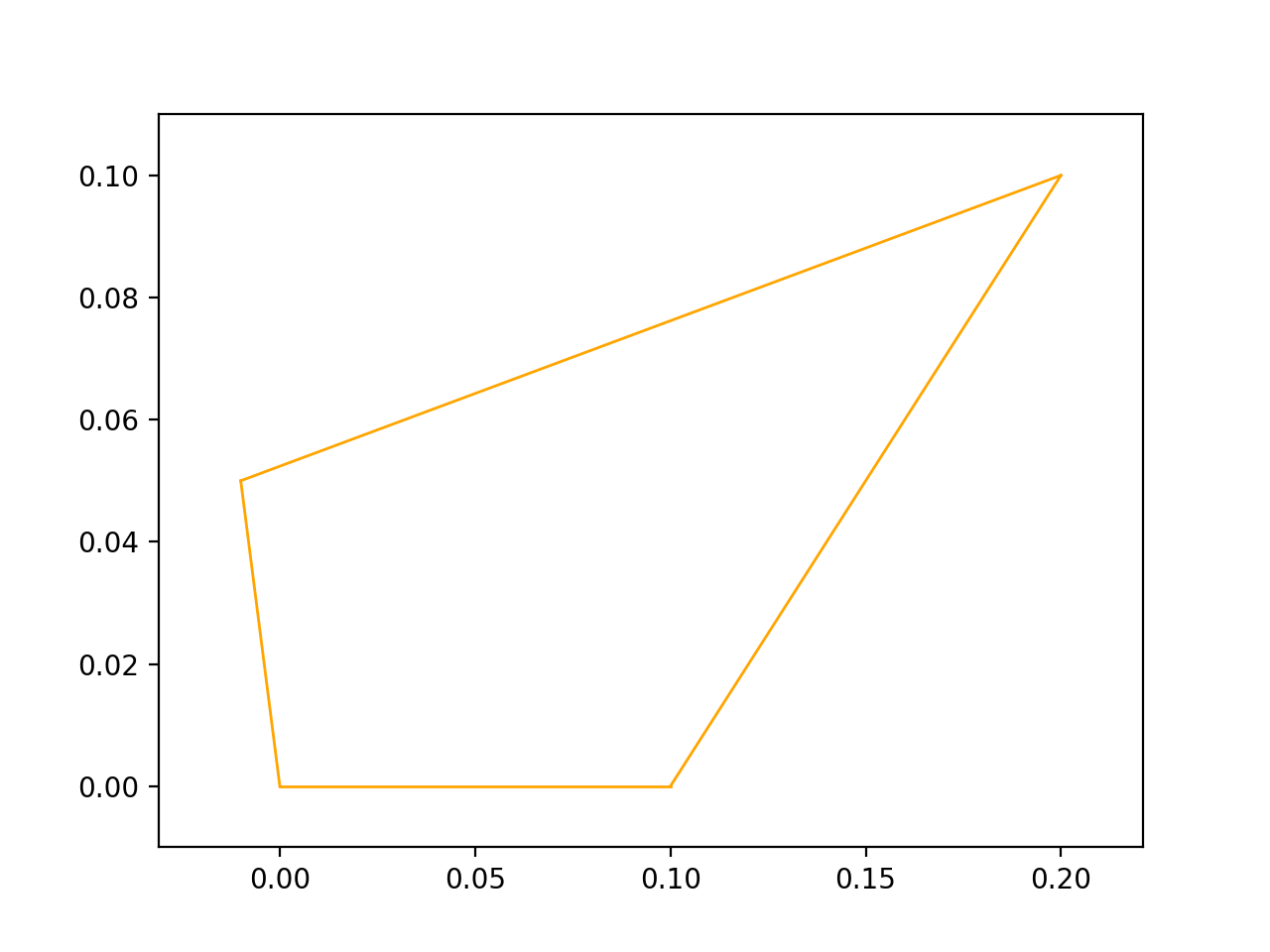
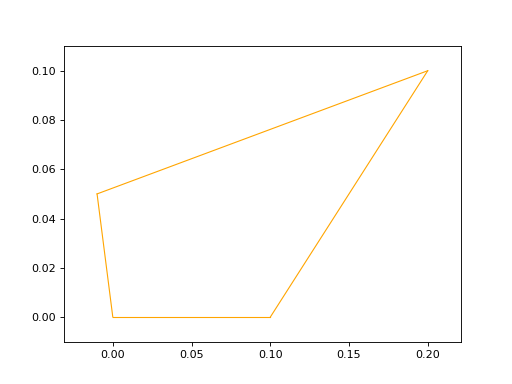
Surface2D#
To create a Surface2D, you need to provide two arguments: a outer_contour and a inner_contours and an optional name parameter.
Attributes: outer_contour: This is a parameter passed to the constructor representing the outer boundary or contour of the surface. It is of type wires.Contour2D, which is a series of connected points that form a closed loop.
inner_contours: This is a parameter representing a list of inner contours within the surface. It is of type List[wires.Contour2D], indicating that there can be multiple inner contours. Inner contours could represent holes or cutouts within the surface.
name: An optional parameter representing the name of the surface. The default value is set to ‘name’ if not provided.
import volmdlr
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
p1s = volmdlr.Point2D(0, 0)
p2s = volmdlr.Point2D(0.1, 0)
p3s = volmdlr.Point2D(0.2, 0.1)
p4s = volmdlr.Point2D(-0.01, 0.05)
surface2d = surfaces.Surface2D(volmdlr.wires.ClosedPolygon2D([p1s, p2s, p3s, p4s]), [])
surface2d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Plane3D#
Plane3D represents a three-dimensional plane. To build it, it is needed a frame and an optimal name parameter.
frame: This is a parameter passed to the constructor, representing a three-dimensional frame that describes the plane. The frame consists of an origin o and vectors u and v that define the plane, and w represents the normal vector to the plane. This implies that the plane is defined by a local coordinate system.
name: An optional parameter representing the name of the plane. The default value is an empty string if not provided.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
frame = volmdlr.Frame3D(
volmdlr.Point3D(0.0, 0.0, 0.0),
volmdlr.Vector3D(1.0, 0.0, 0.0),
volmdlr.Vector3D(0.0, 1.0, 0.0),
volmdlr.Vector3D(0.0, 0.0, 1.0),
)
surface3d = surfaces.Plane3D(frame)
surface3d.plot(edge_style=EdgeStyle('orange'), length=2)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
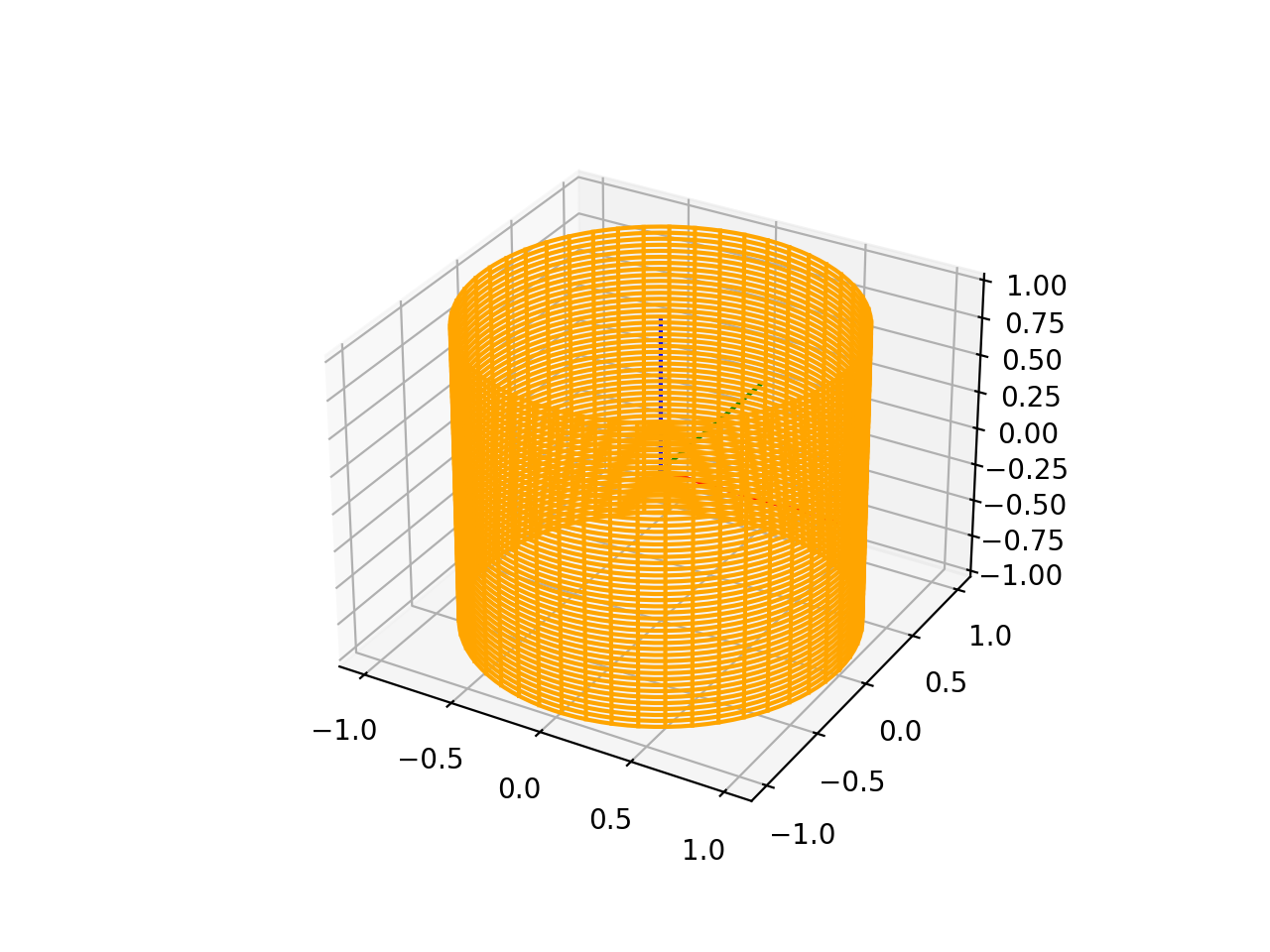
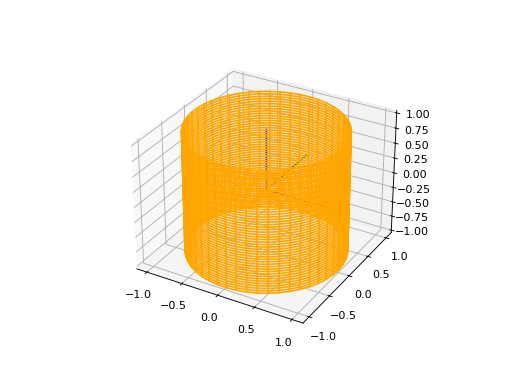
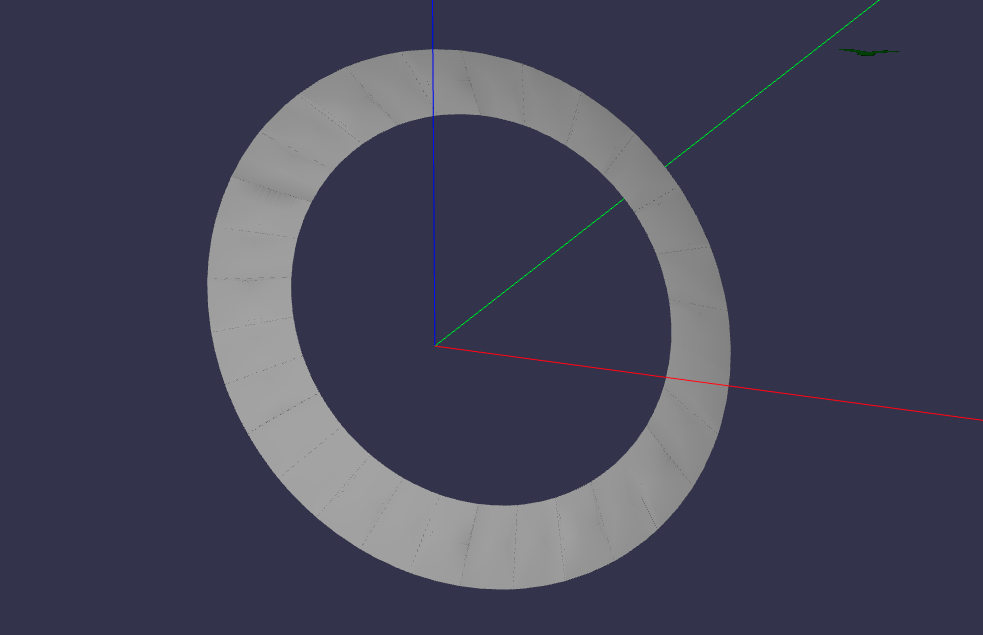
CylindricalSurface3D#
To instantiate a CylindricalSurface3D, you have to provide tree parameters: a frame, a radius, and an optional name.
frame: This is a parameter passed to the constructor, representing a three-dimensional frame that describes the plane. The frame consists of an origin o and vectors u and v that define the plane, and w represents the normal vector to the plane. This implies that the plane is defined by a local coordinate system.
radius: The Cylinder radius.
name: An optional parameter representing the name of the plane. The default value is an empty string if not provided.
import volmdlr
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
surface3d = surfaces.CylindricalSurface3D(volmdlr.OXYZ, 1, 'cylindrical_surface_name')
surface3d.plot(edge_style=EdgeStyle('orange'), length=2)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
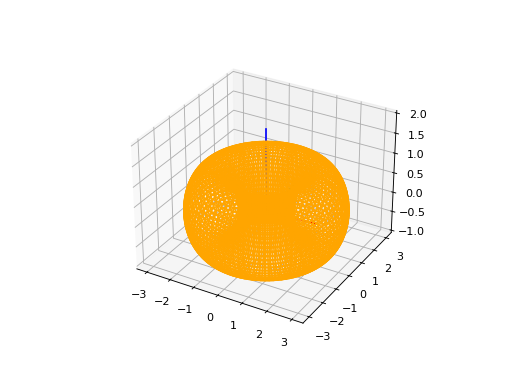
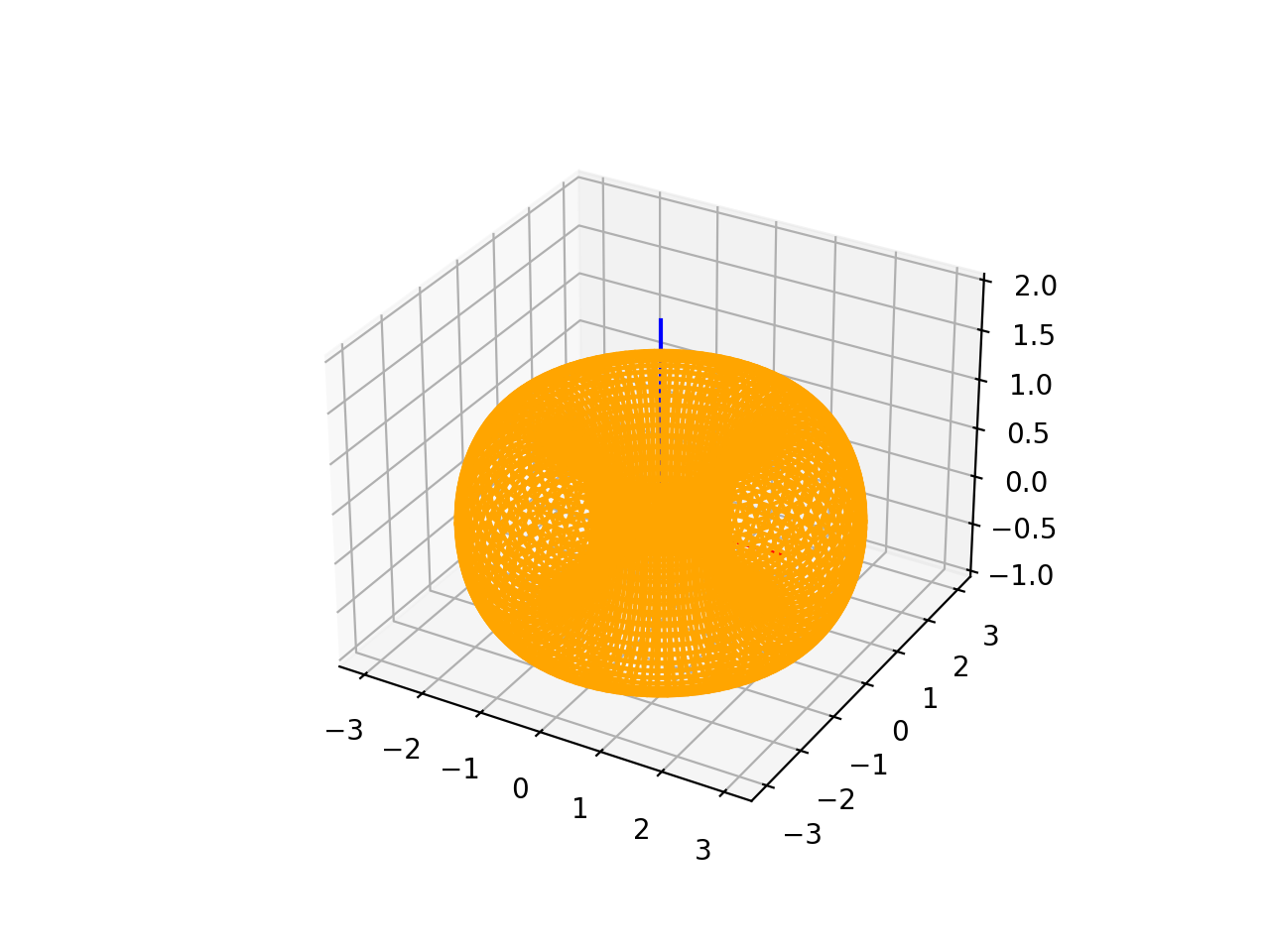
ToroidalSurface3D#
To instantiate a ToroidalSurface3D, you have to provide tree parameters: a frame, a major_radius, a minor_radius and an optional name.
frame: This is a parameter passed to the constructor, representing a three-dimensional frame that describes the plane. The frame consists of an origin o and vectors u and v that define the plane, and w represents the normal vector to the plane. This implies that the plane is defined by a local coordinate system.
major_radius: The torus major radius.
minor_radius: The torus minor radius.
name: An optional parameter representing the name of the plane. The default value is an empty string if not provided.
import volmdlr
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
surface3d = surfaces.ToroidalSurface3D(
frame=volmdlr.OXYZ,
major_radius=2,
minor_radius=1,
name='toroidal_surface_name',
)
surface3d.plot(edge_style=EdgeStyle('orange'), length=2)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
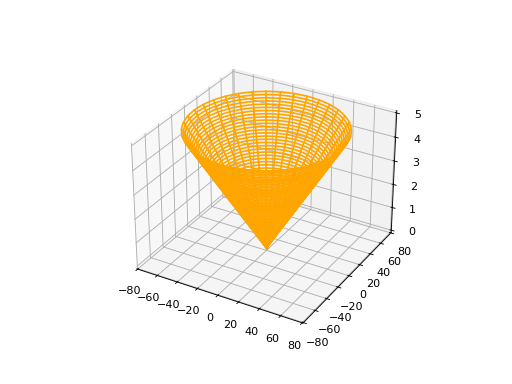
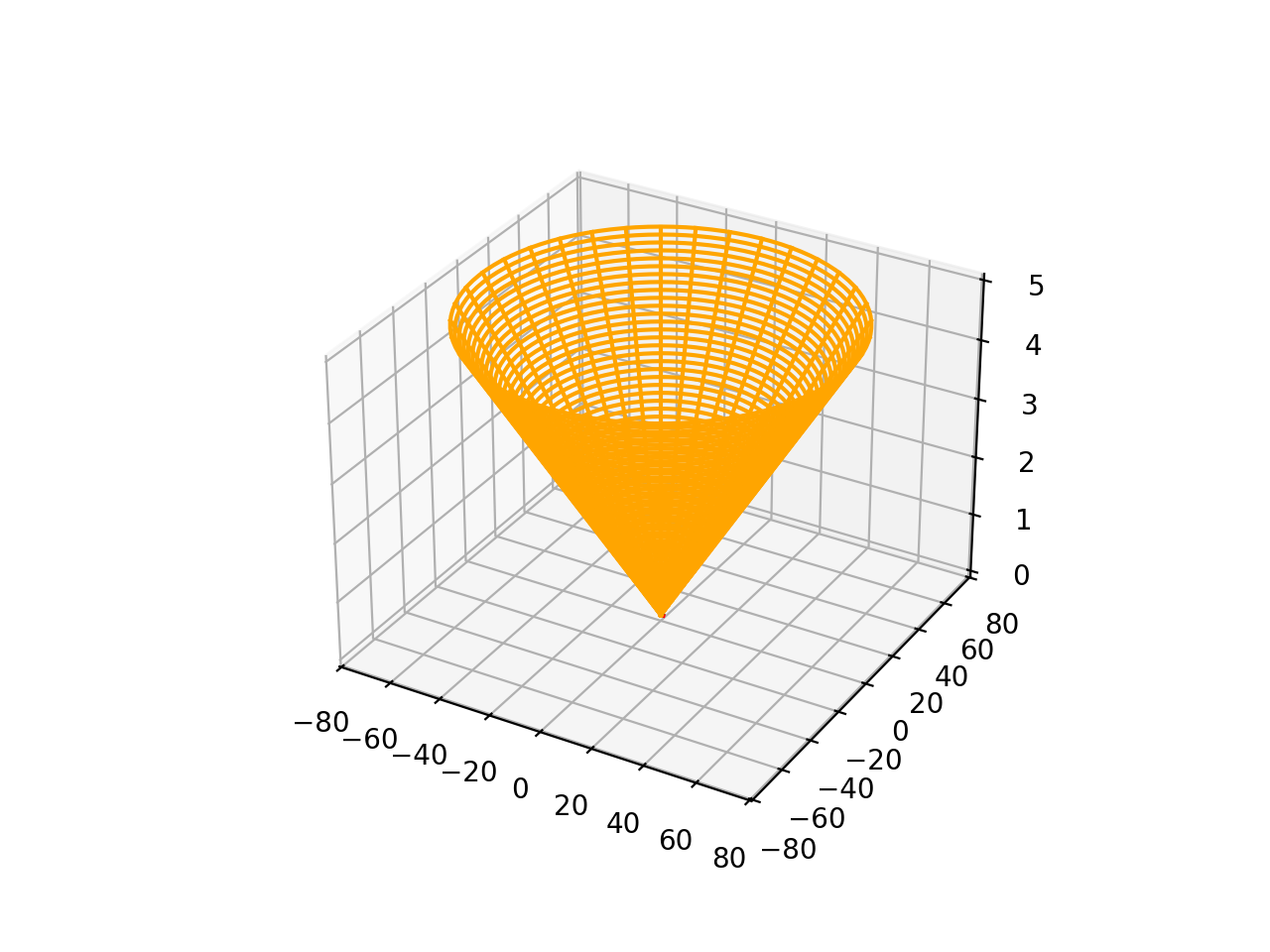
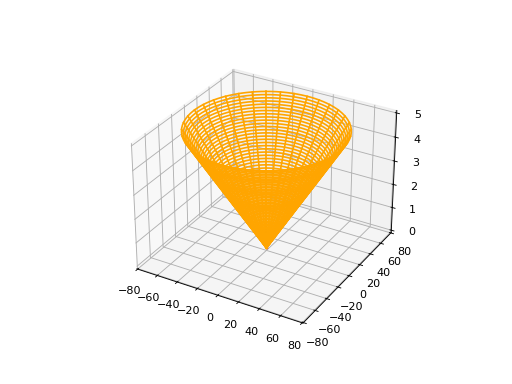
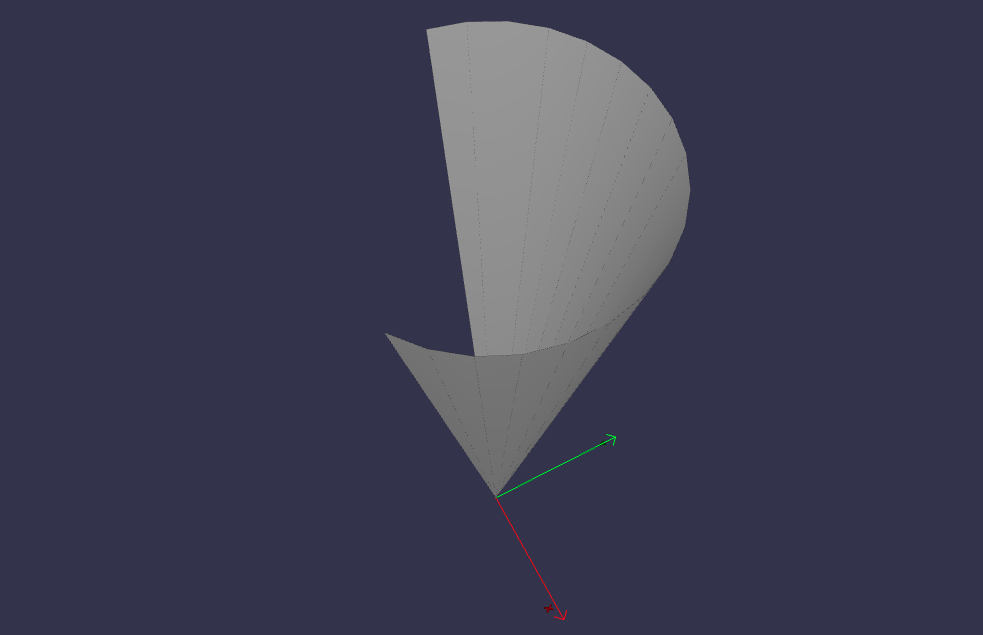
ConicalSurface3D#
To instantiate a ConicalSurface3D, you have to provide tree parameters: a frame, a angle and an optional name parameter.
frame: This is a parameter passed to the constructor, representing a three-dimensional frame that describes the plane. The frame consists of an origin o and vectors u and v that define the plane, and w represents the normal vector to the plane. This implies that the plane is defined by a local coordinate system.
semi_angle: This is a parameter represents the semi-angle of the cone. The semi-angle defines the opening of the cone.
name: An optional parameter representing the name of the plane. The default value is an empty string if not provided.
import volmdlr
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
surface3d = surfaces.ConicalSurface3D(
frame=volmdlr.OXYZ,
semi_angle=1.5,
name='conical_surface_name',
)
surface3d.plot(edge_style=EdgeStyle('orange'), z=5)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
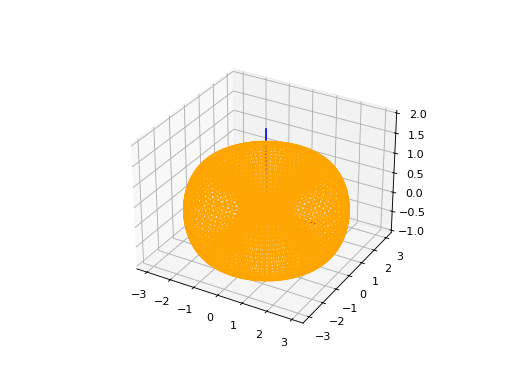
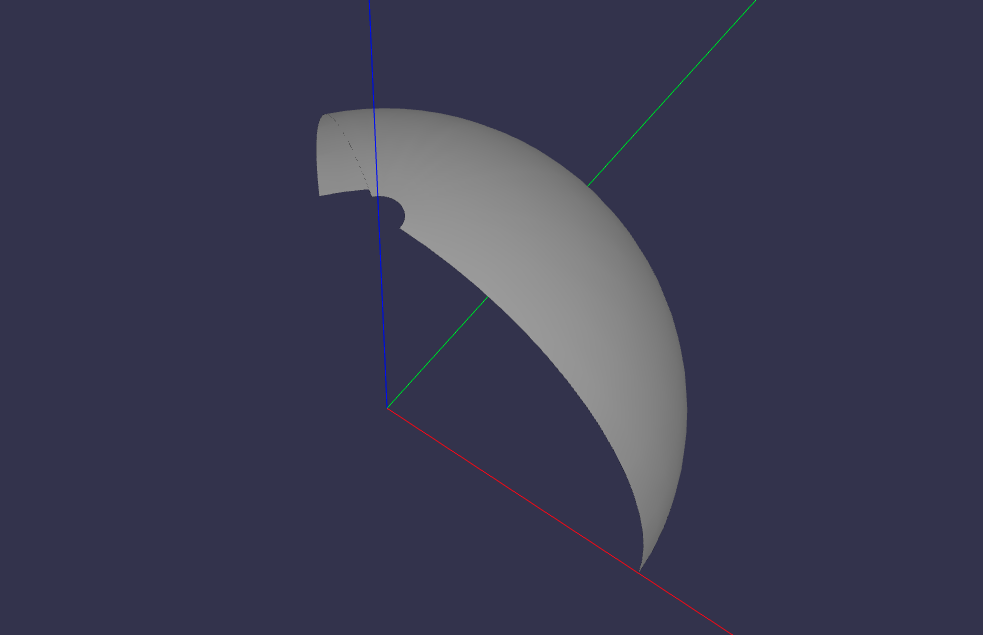
SphericalSurface3D#
To instantiate a SphericalSurface3D, you have to provide tree parameters: a frame, a radius and an optional name.
frame: This is a parameter passed to the constructor, representing a three-dimensional frame that describes the plane. The frame consists of an origin o and vectors u and v that define the plane, and w represents the normal vector to the plane. This implies that the plane is defined by a local coordinate system.
radius: This parameter represents the radius of the sphere.
name: An optional parameter representing the name of the plane. The default value is an empty string if not provided.
import volmdlr
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
surface3d = surfaces.SphericalSurface3D(
frame=volmdlr.OXYZ, radius=2, name='spherical_surface_name'
)
surface3d.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
RulledSurface3D#
This Class represents a three-dimensional ruled surface, which is a surface created by connecting points between two wires. To instantiate it, you need to provide 3 parameters: wire1, wire2`and `name.
wire1: This is a parameter passed to the constructor, representing the first wire defining the ruled surface. It is of type wires.Wire3D.
wire2: This is a parameter passed to the constructor, representing the second wire defining the ruled surface. Like wire1, it is of type wires.Wire3D.
name: An optional parameter representing the name of the ruled surface. The default value is an empty string if not provided.
import volmdlr
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
#todo
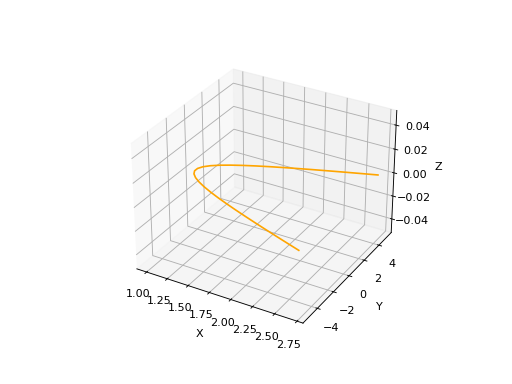
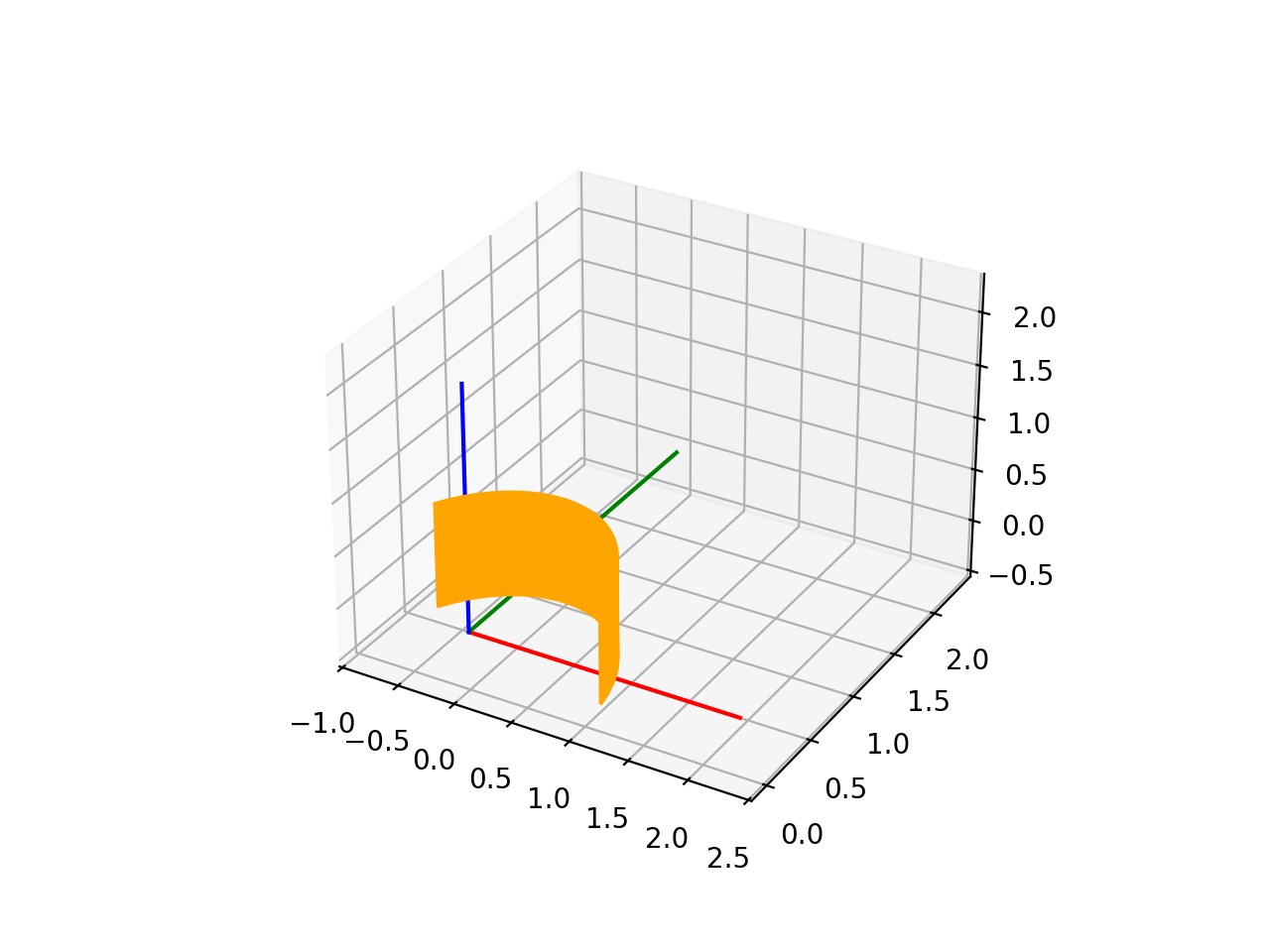
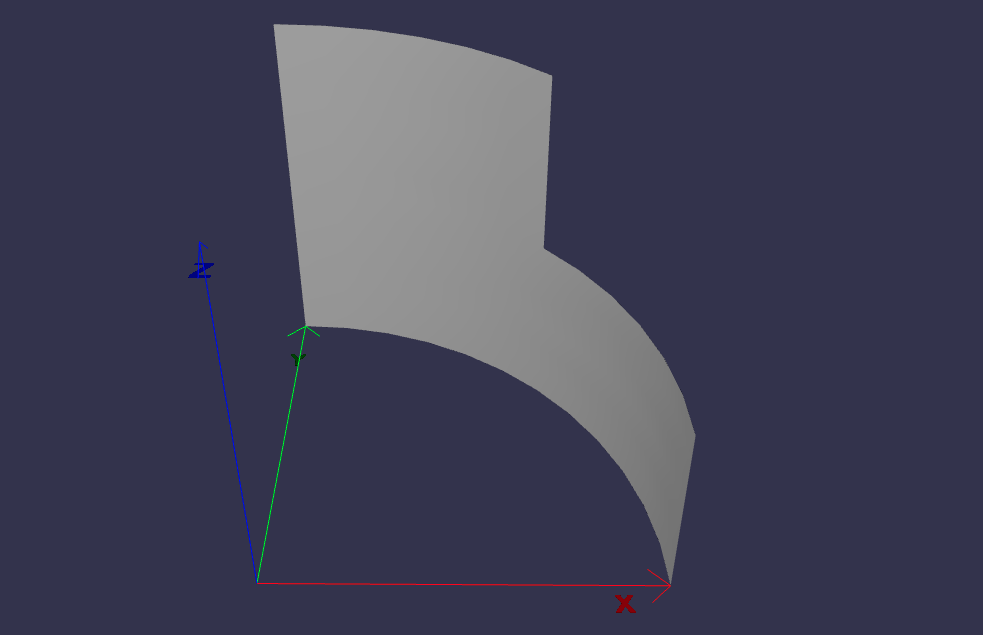
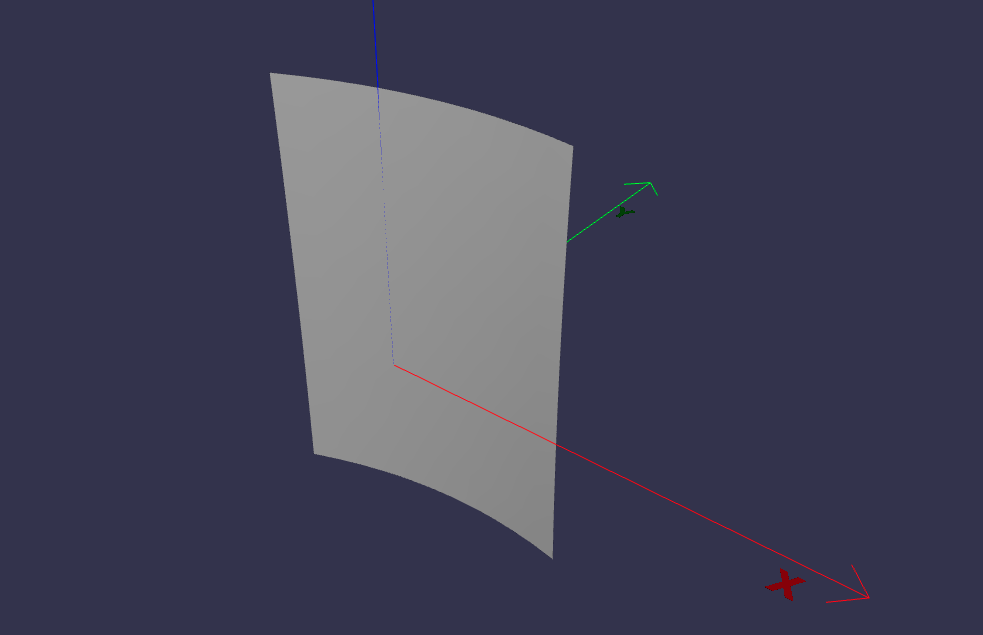
ExtrusionSurface3D#
This class represents a three-dimensional extrusion surface. It can be instantiated by providing:
edge: This is a parameter passed to the constructor, representing the edge that defines the curve to be extruded. It is of type Union[edges.FullArcEllipse3D, edges.BSplineCurve3D], indicating that the edge is expected to be an Ellipse or a B-Spline curve. But The edge can also be either a Wire3D or a Contour3D
direction: This is a parameter passed to the constructor, representing the axis of extrusion. It is of type volmdlr.Vector3D. The direction vector is normalized to ensure it is a unit vector.
name: An optional parameter representing the name of the extrusion surface. The default value is an empty string if not provided.
import volmdlr
from volmdlr import edges, surfaces, curves
from volmdlr.core import EdgeStyle
circle3d = curves.Circle3D(volmdlr.OXYZ, 1)
arc3d = edges.Arc3D(circle3d, start=circle3d.point_at_abscissa(0.2),
end=circle3d.point_at_abscissa(2.5))
surface = surfaces.ExtrusionSurface3D(arc3d, volmdlr.Z3D)
surface.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
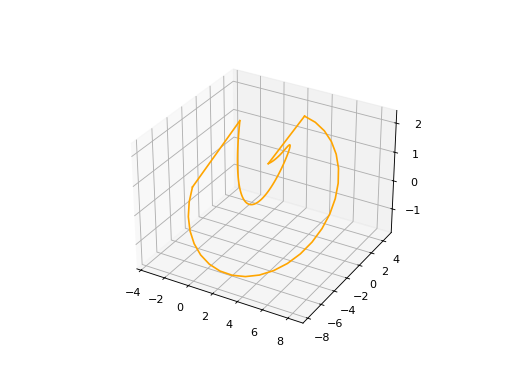
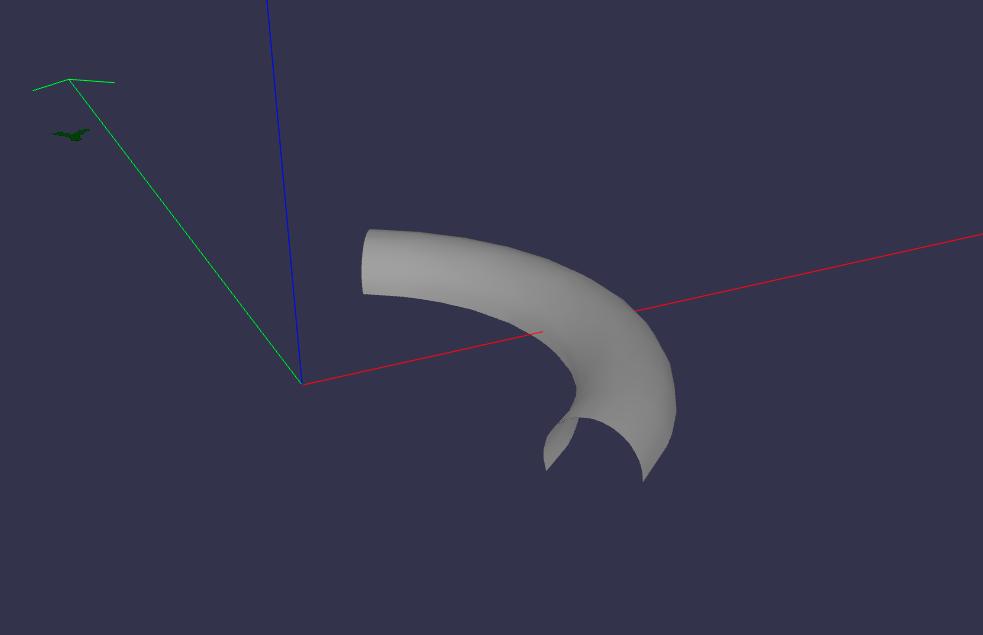
RevolutionSurface3D#
RevolutionSurface3D represents a three-dimensional surface of revolution. To instantiate it, it is needed to provide:
`edge: This is a parameter passed to the constructor, representing the edge that defines the profile curve of the surface of revolution. It is of type edges.Edge, indicating that it is expected to be an edge.
axis_point: This is a parameter passed to the constructor, representing the placement of the axis of revolution. It is of type volmdlr.Point3D.
axis: This is a parameter passed to the constructor, representing the axis of revolution. It is of type volmdlr.Vector3D. The axis vector is normalized to ensure it is a unit vector.
name: An optional parameter representing the name of the revolution surface. The default value is an empty string if not provided.
import math
import volmdlr
from volmdlr import edges, wires, surfaces
from volmdlr.core import EdgeStyle
linesegment = edges.LineSegment3D(volmdlr.Point3D(0.5, 0, 0), volmdlr.Point3D(0.5, 0, 0.5))
arc = edges.Arc3D.from_3_points(volmdlr.Point3D(0.5, 0, 0.5),
volmdlr.Point3D(0.3 + 0.2 * math.cos(math.pi / 6), 0, 0.5 + 0.2 * math.sin(math.pi / 6)),
volmdlr.Point3D(0.3 + 0.2 * math.cos(math.pi / 3), 0, 0.5 + 0.2 * math.sin(math.pi / 3)))
wire = wires.Wire3D([linesegment, arc])
axis_point = volmdlr.O3D
axis = volmdlr.Z3D
surface = surfaces.RevolutionSurface3D(wire, axis_point, axis)
surface.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
BSplineSurface3D#
BsplineSurface3D Represents a three-dimensional B-spline surface. To instantiate it, it is needed to provide:
degree_u: Represents the degree of the B-spline curve in the u direction.
degree_v: Represents the degree of the B-spline curve in the v direction.
control_points: Represents a list of 3D control points that define the shape of the surface. The control points are of type List[volmdlr.Point3D].
nb_u: Represents the number of control points in the u direction.
nb_v: Represents the number of control points in the v direction.
u_multiplicities: Represents a list of multiplicities for the knots in the u direction.
v_multiplicities: Represents a list of multiplicities for the knots in the v direction.
u_knots: Represents a list of knots in the u direction. The knots are real numbers that define the position of the control points along the u direction.
v_knots: Represents a list of knots in the v direction. The knots are real numbers that define the position of the control points along the v direction.
weights: This is an optional parameter representing a list of weights for the control points. The weights can be used to adjust the influence of each control point on the shape of the surface. The default value is None.
name: An optional parameter representing the name of the B-spline surface. The default value is an empty string if not provided.
from volmdlr import surfaces
from volmdlr.core import EdgeStyle
import numpy as np
bsp = surfaces.BSplineSurface3D(3, 3, np.array([
[-0.47224769, -0.50977339, 0.51416422], [-0.47115651, -0.50983955, 0.51600901], [-0.46856059, -0.50991921, 0.51817403],
[-0.46431341, -0.50995821, 0.51910384], [-0.46105775, -0.50995121, 0.51876123], [-0.45806846, -0.5099087 , 0.51741441],
[-0.45565101, -0.50983505, 0.51520204], [-0.45352158, -0.5097055 , 0.51140362], [-0.45340494, -0.50958741, 0.50802068],
[-0.45405263, -0.50951481, 0.5059723 ], [-0.47225024, -0.51143904, 0.51410599], [-0.47115906, -0.5115052 , 0.51595078],
[-0.46856313, -0.51158486, 0.51811579], [-0.46431596, -0.51162386, 0.51904561], [-0.4610603 , -0.51161686, 0.518703 ],
[-0.458071 , -0.51157434, 0.51735618], [-0.45565355, -0.51150069, 0.51514381], [-0.45352413, -0.51137115, 0.51134539],
[-0.45340749, -0.51125306, 0.50796245], [-0.45405517, -0.51118046, 0.50591406], [-0.47225533, -0.51477033, 0.51398953],
[-0.47116415, -0.51483649, 0.51583431], [-0.46856823, -0.51491615, 0.51799933], [-0.46432105, -0.51495515, 0.51892915],
[-0.46106539, -0.51494815, 0.51858653], [-0.4580761 , -0.51490564, 0.51723971], [-0.45565865, -0.51483199, 0.51502734],
[-0.45352922, -0.51470245, 0.51122892], [-0.45341258, -0.51458435, 0.50784598], [-0.45406027, -0.51451175, 0.5057976 ],
[-0.47226043, -0.51810162, 0.51387306], [-0.47116925, -0.51816779, 0.51571785], [-0.46857332, -0.51824745, 0.51788287],
[-0.46432615, -0.51828645, 0.51881268], [-0.46107049, -0.51827945, 0.51847007],
[-0.45808119, -0.51823693, 0.51712325], [-0.45566374, -0.51816328, 0.51491088], [-0.45353431, -0.51803374, 0.51111246],
[-0.45341768, -0.51791565, 0.50772952], [-0.45406536, -0.51784304, 0.50568114], [-0.47226297, -0.51976727, 0.51381483],
[-0.47117179, -0.51983343, 0.51565961], [-0.46857587, -0.51991309, 0.51782463], [-0.46432869, -0.51995209, 0.51875445],
[-0.46107303, -0.51994509, 0.51841183], [-0.45808374, -0.51990258, 0.51706502], [-0.45566629, -0.51982893, 0.51485265],
[-0.45353686, -0.51969939, 0.51105423], [-0.45342022, -0.5195813 , 0.50767128], [-0.4540679 , -0.51950869, 0.5056229 ]]),
u_multiplicities=np.array([4, 1, 4]),
v_multiplicities=np.array([4, 1, 1, 1, 1, 1, 1, 4]),
u_knots=np.array([0. , 0.5, 1. ]),
v_knots=np.array([0., 0.22112628, 0.33220626, 0.4436676 , 0.55534525, 0.66698786, 0.77835802, 1.]),
nb_u=5, nb_v=10)
bsp.plot(edge_style=EdgeStyle('orange'))
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
Faces#
For defining faces, what is important to consider before starting is that the material shall always be to the left of the edge when moving along the edges in the direction of the contour. So it means that if the face has inner contours, the inner contours should be in the opposite sense of the outer contour, as illustrated in the image below:
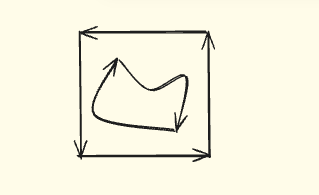
When defining a face from 3D contours, this rule should be applied respecting the right hand convention, so, the definition of left in 3D, and the direction of the contour is with respect to normal direction of the surface that defines the face. So, if we suppose the image above is a 3D contour of a planar face, the normal of the planar surface would be pointing away from the page, and so the material is to the left of the edges of the contour.
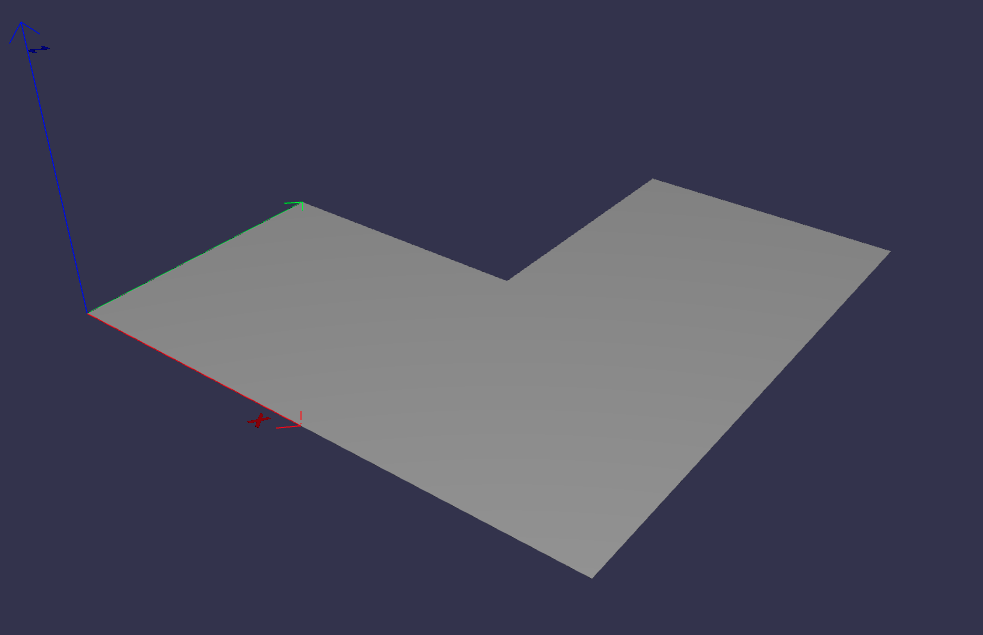
PlaneFace3D#
To create a PlaneFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a Plane3D, which is constructed using a Frame3D and an optional name parameter.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the PlaneFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
frame = volmdlr.Frame3D(
volmdlr.Point3D(0.0, 0.0, 0.0),
volmdlr.Vector3D(1.0, 0.0, 0.0),
volmdlr.Vector3D(0.0, 1.0, 0.0),
volmdlr.Vector3D(0.0, 0.0, 1.0),
)
surface3d = surfaces.Plane3D(frame)
outer_contour2d = wires.Contour2D.from_points(
points=[
volmdlr.Point2D(0., 0.),
volmdlr.Point2D(2, 0),
volmdlr.Point2D(2, 2),
volmdlr.Point2D(1, 2),
volmdlr.Point2D(1, 1),
volmdlr.Point2D(0, 1),
]
)
inner_contours2d = []
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=inner_contours2d)
plane_face = faces.PlaneFace3D(surface3d=surface3d, surface2d=surface2d)
plane_face.display_3d()
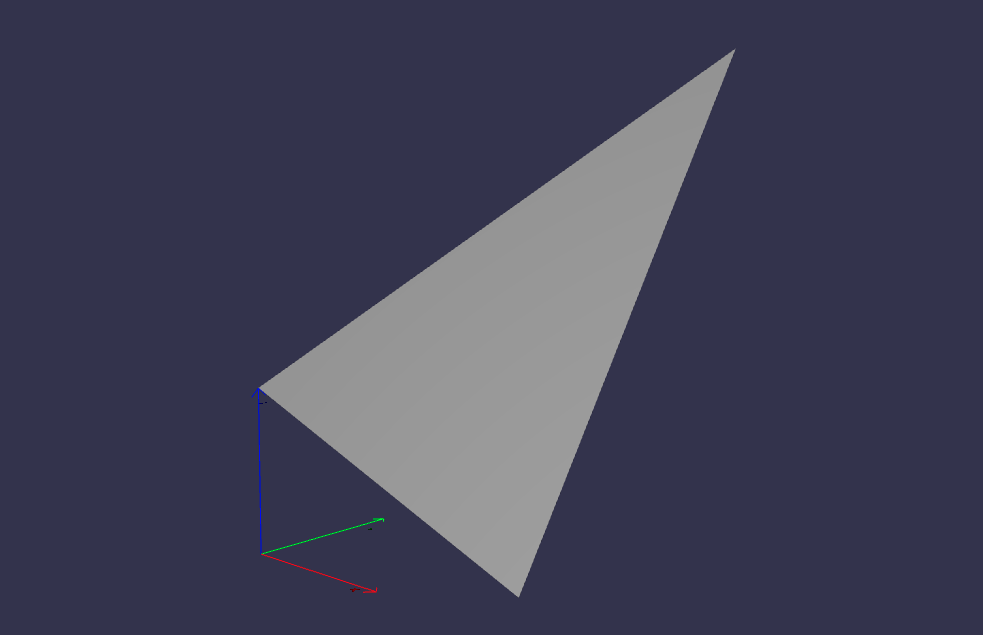
Triangle3D#
A Triangle3D receives three mandatory arguments: The three vertices points of the triaangle, along with a last optional name argument.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
triangle3d = faces.Triangle3D(
volmdlr.Point3D(0., 0., 1.0),
volmdlr.Point3D(2, 0, 0.2),
volmdlr.Point3D(2, 2, 3.0),
)
triangle3d.display_3d()
CylindricalFace3D#
To create a CylindricalFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a CylindricalSurface3D, which is constructed using a Frame3D, a float value for the cylinder radius and an optional name parameter.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the CylindricalFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
vector1 = volmdlr.Vector3D(1, 1, 1)
vector1 = vector1.unit_vector()
vector2 = vector1.deterministic_unit_normal_vector()
vector3 = vector1.cross(vector2)
frame = volmdlr.Frame3D(volmdlr.O3D, vector1, vector2, vector3)
surface3d = surfaces.CylindricalSurface3D(frame, 1)
outer_contour2d = wires.Contour2D.from_points(
points=[
volmdlr.Point2D(0., 0.),
volmdlr.Point2D(4, 0),
volmdlr.Point2D(4, 4),
volmdlr.Point2D(2, 4),
volmdlr.Point2D(2, 2),
volmdlr.Point2D(0, 2),
]
)
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=[])
face3d = faces.CylindricalFace3D(surface3d, surface2d)
face3d.display_3d()
ToroidalFace3D#
To create a ToroidalFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a ToroidalSurface3D, which is constructed using three main arguments:
Frame3D: the three dimensional frame where the toroidal face is at.
tore_radius: The distance from the center of the torus to the center of the tube (the larger radius).
small_radius: The radius of the tube (the smaller radius).
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the ToroidalFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
surface3d = surfaces.ToroidalSurface3D(
volmdlr.OXYZ,
major_radius=0.2,
minor_radius=0.03,
name='toroidalsurface3d',
)
points = [
volmdlr.Point2D(-1.0, 0),
volmdlr.Point2D(1, 0),
volmdlr.Point2D(1, 3.5),
volmdlr.Point2D(-1, 3.5),
]
outer_contour2d = wires.Contour2D.from_points(points=points)
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=[])
toroidal_face3d = faces.ToroidalFace3D(surface3d, surface2d)
toroidal_face3d.display_3d()
ConicalFace3D#
To create a ConicalFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a ConicalSurface3D, which is constructed using two main arguments:
Frame3D: the three dimensional frame where the conical face is at. The frame.w is the cone’s axis
semi_angle: The semi-angle of a cone refers to the angle between the central axis of the cone and a line connecting the apex (top) of the cone to a point on the base.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the ConicalFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
surface3d = surfaces.ConicalSurface3D(
volmdlr.OXYZ, semi_angle=0.2, name='conicalsurface3d'
)
points = [
volmdlr.Point2D(-1.0, 0.0),
volmdlr.Point2D(3.0, 0.0),
volmdlr.Point2D(3.0, 4.0),
volmdlr.Point2D(-1.0, 4.0),
]
outer_contour2d = wires.Contour2D.from_points(points=points)
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=[])
toroidal_face3d = faces.ConicalFace3D(surface3d, surface2d)
toroidal_face3d.display_3d()
SphericalFace3D#
To create a SphericalFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a SphericalSurface3D, which is constructed using two main arguments:
Frame3D: the three dimensional frame where the spherical face is at. The frame.origin is the spheres’ center.
radius: the radius of the sphere.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the ConicalFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
surface3d = surfaces.SphericalSurface3D(
volmdlr.OXYZ, radius=0.2, name='sphericalsurface3d'
)
points = [
volmdlr.Point2D(0.0, 0.0),
volmdlr.Point2D(2.5, 0.0),
volmdlr.Point2D(2.5, 1.5),
volmdlr.Point2D(0.0, 1.5),
]
outer_contour2d = wires.Contour2D.from_points(points=points)
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=[])
spherical_face3d = faces.SphericalFace3D(surface3d, surface2d)
spherical_face3d.display_3d()
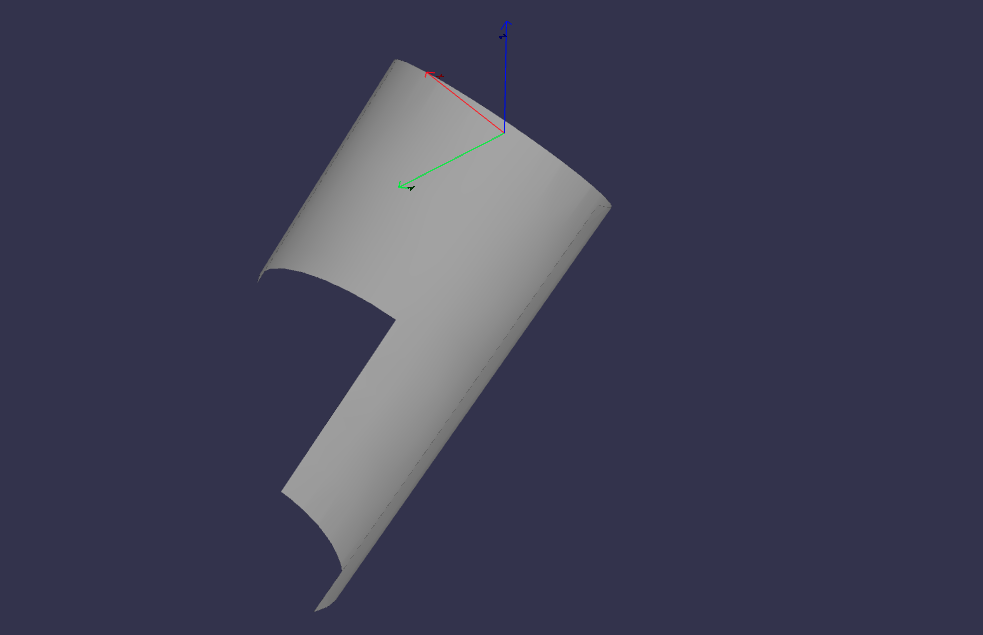
RuledFace3D#
ExtrusionFace3D#
To create a ExtrusionFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a ExtrusionSurface3D, which is constructed using two main arguments:
edge: the edge to be estruded.
direction: The extrusion direction vector.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the ExtrusionFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
arc2 = volmdlr.edges.Arc3D(
curves.Circle3D(volmdlr.OXYZ, 1),
volmdlr.Point3D(1, 0, 0),
volmdlr.Point3D(0, 1, 0),
)
surface3d = surfaces.ExtrusionSurface3D(
edge=arc2, direction=volmdlr.Z3D
)
outer_contour2d = wires.Contour2D.from_points(
points=[
volmdlr.Point2D(0., 0.),
volmdlr.Point2D(1, 0),
volmdlr.Point2D(1, 1),
volmdlr.Point2D(0.5, 1),
volmdlr.Point2D(0.5, 0.5),
volmdlr.Point2D(0, 0.5),
]
)
inner_contours2d = []
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=inner_contours2d)
face = faces.ExtrusionFace3D(surface3d, surface2d)
face.display_3d()
RevolutionFace3D#
To create a RevolutionFace3D, you need to provide two arguments: a surface3d and a surface2d.
For the surface3d, you must create a RevolutionSurface3D, which is constructed using three main arguments:
edge: the revolution edge.
axis_point: revolution’s axis point.
axis: The axis of revolution.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the RevolutionFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
frame = volmdlr.Frame3D(
volmdlr.Point3D(0.003516498393599, -0.01267818173491, 0.0),
volmdlr.Vector3D(1.0, 0.0, 0.0),
volmdlr.Vector3D(0.0, 1.0, 0.0),
volmdlr.Vector3D(0.0, 0.0, 1.0),
)
circle = curves.Circle3D(frame, radius=0.024102542625267)
fullarc = edges.FullArc3D(
circle=circle,
start_end=volmdlr.Point3D(0.027619041018866, -0.01267818173491, 0),
)
surface3d = surfaces.RevolutionSurface3D(
edge=fullarc,
axis_point=volmdlr.Point3D(0, 0, 0),
axis=volmdlr.Vector3D(0, 1, 0),
)
TWO_PI = 6.283185307179586
outer_contour2d = wires.Contour2D(
primitives=[
edges.LineSegment2D(
volmdlr.Point2D(0.0, 0.0235507767161),
volmdlr.Point2D(TWO_PI, 0.0235507767161),
),
edges.LineSegment2D(
volmdlr.Point2D(TWO_PI, 0.0235507767161),
volmdlr.Point2D(TWO_PI, 0.0161625370352),
),
edges.LineSegment2D(
volmdlr.Point2D(TWO_PI, 0.0161625370352),
volmdlr.Point2D(0.0, 0.0161625370352),
),
edges.LineSegment2D(
volmdlr.Point2D(0.0, 0.0161625370352),
volmdlr.Point2D(0.0, 0.0235507767161),
),
]
)
inner_contours2d = []
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=inner_contours2d)
face = faces.RevolutionFace3D(surface3d, surface2d)
face.display_3d()
BSplineFace3D#
To create a RevolutionFace3D, you need to provide two arguments: a surface3d and a surface2d.
1. For the surface3d, you must create a BSplineSurface3D, for which we have to provide the necessary parameters, such as the degrees (degree_u and degree_v), control points (instances of Point3D), number of control points in u and v directions (nb_u and nb_v), knot multiplicities, knot vectors (u_knots and v_knots), optional weights, and name.
For the surface2d, you instantiate it by providing an outer contour in 2D, which will serve as the outer border of the face. Additionally, you need to provide a list of inner contours in 2D, representing any holes within the face, if applicable. The surface2d can also have an optional name argument.
Ensure to provide the necessary information for both surface3d and surface2d to successfully create the RevolutionFace3D.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces
from volmdlr.core import EdgeStyle
control_points = [
volmdlr.Point3D(0, 0, 0),
volmdlr.Point3D(0.1, 0.02, 0),
volmdlr.Point3D(0.2, 0.02, 0),
volmdlr.Point3D(0, 0, 0.15),
volmdlr.Point3D(0.1, 0.02, 0.15),
volmdlr.Point3D(0.2, 0.02, 0.15),
volmdlr.Point3D(0, 0, 0.3),
volmdlr.Point3D(0.1, 0.021, 0.3),
volmdlr.Point3D(0.2, 0.022, 0.3),
]
surface3d = surfaces.BSplineSurface3D(
degree_u=2,
degree_v=2,
control_points=control_points,
nb_u=3,
nb_v=3,
u_multiplicities=[1, 2, 2, 1],
v_multiplicities=[1, 2, 2, 1],
u_knots=[0.1, 0.3, 0.5, 0.7],
v_knots=[0.1, 0.3, 0.5, 0.7],
)
outer_contour2d = wires.Contour2D.from_points(
points=[
volmdlr.Point2D(0, 0),
volmdlr.Point2D(1, 0),
volmdlr.Point2D(1, 1),
volmdlr.Point2D(0, 1),
]
)
inner_contours2d = []
surface2d = surfaces.Surface2D(outer_contour=outer_contour2d, inner_contours=inner_contours2d)
face = faces.BSplineFace3D(surface3d, surface2d)
face.display_3d()
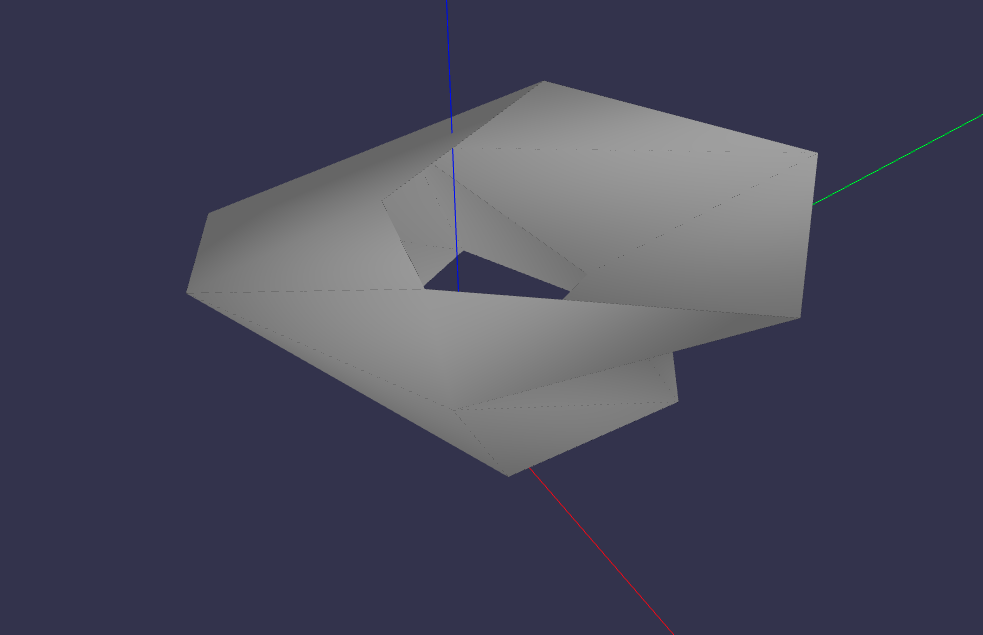
Shells#
A shell is defined as a collection of connected faces. A Shell can a ClosedShell3D or an OpenShell3D. it receives as parameters a list of faces (instances of Face3D), optional color, alpha (transparency), name, and a bounding box.
In the example below, it is shown the definition of the shell’s lateral faces.
import volmdlr
from volmdlr import edges, curves, surfaces, wires, faces, shells
from volmdlr.core import EdgeStyle
import math
polygon1_vol1 = wires.ClosedPolygon3D([
volmdlr.Point3D(-0.1, -0.05, 0),
volmdlr.Point3D(-0.15, 0.1, 0),
volmdlr.Point3D(0.05, 0.2, 0),
volmdlr.Point3D(0.12, 0.15, 0),
volmdlr.Point3D(0.1, -0.02, 0),
])
polygon2_vol1 = polygon1_vol1.rotation(
volmdlr.O3D, volmdlr.Z3D, math.pi
).translation(0.2 * volmdlr.Z3D)
polygon3_vol1 = polygon2_vol1.rotation(
volmdlr.O3D, volmdlr.Z3D, math.pi / 8
).translation(0.1 * (volmdlr.Z3D + volmdlr.X3D + volmdlr.Y3D))
faces_ = [faces.Triangle3D(*points)
for points in polygon1_vol1.sewing(polygon2_vol1, volmdlr.X3D, volmdlr.Y3D)] + \
[faces.Triangle3D(*points)
for points in polygon2_vol1.sewing(polygon3_vol1, volmdlr.X3D, volmdlr.Y3D)]
OpenShell3D#
With these faces we can instantiate an OpenShell3D:
shell1 = shells.OpenShell3D(faces_)
shell1.display_3d()
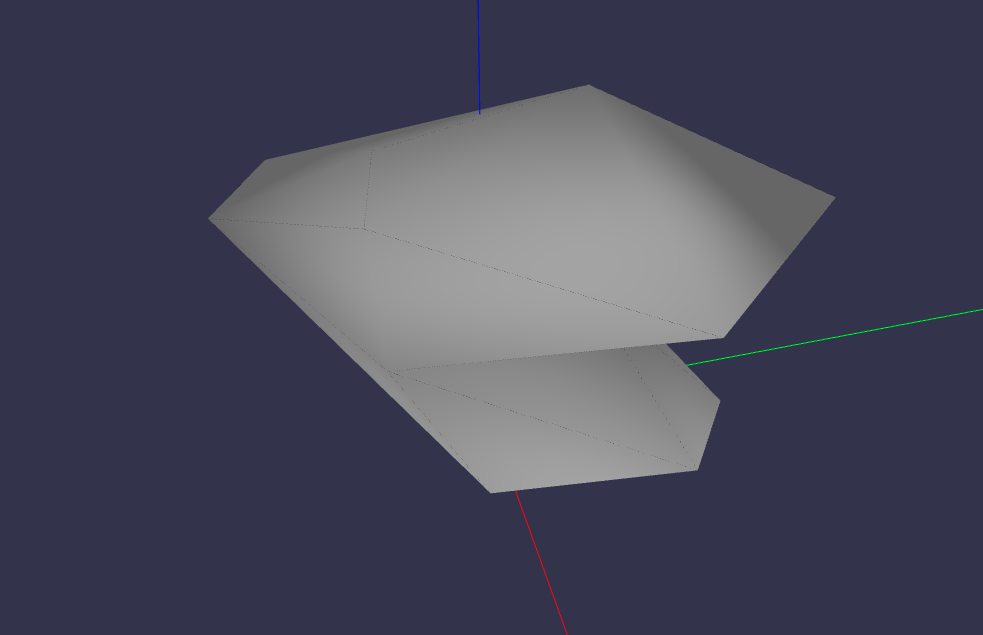
ClosedShell3D#
Then the bottom and top faces can be created so a closedshell3d can be instantiated:
bottom_surface3d = surfaces.Plane3D.from_plane_vectors(volmdlr.O3D, volmdlr.X3D, volmdlr.Y3D)
bottom_surface2d = surfaces.Surface2D(polygon1_vol1.to_2d(volmdlr.O3D, volmdlr.X3D, volmdlr.Y3D),[])
top_surface3d = surfaces.Plane3D.from_plane_vectors(0.3*volmdlr.Z3D, volmdlr.X3D, volmdlr.Y3D)
top_surface2d = surfaces.Surface2D(polygon3_vol1.to_2d(volmdlr.O3D, volmdlr.X3D, volmdlr.Y3D),[])
bottom_face = faces.PlaneFace3D(bottom_surface3d, bottom_surface2d)
top_face = faces.PlaneFace3D(top_surface3d, top_surface2d)
faces_ += [bottom_face, top_face]
shell1 = shells.ClosedShell3D(faces_)
shell1.display_3d()
Shapes#
The shapes module provides OpenCASCADE-based B-Rep modeling objects including Solid, Shell, Compound, Face, Wire, Edge, and Vertex. For detailed information about these classes, see Shapes.
Example of creating a simple box using shapes:
from volmdlr import shapes
# Create a box solid
box = shapes.Solid.make_box(1.0, 2.0, 3.0) # width, height, depth
box.display_3d()